Hi, I recently began testing an indoor drone but I’m having issues with control. It is a 4 inch V quadcopter running Ardupilot 4.5.1 on a cube orange. I have got it to fly in stabilised mode, alt hold mode and flow hold mode, but the flight performance is awful.
It is a heavy drone, weighing a little over a kilo, however it does maintain a thrust to weight ratio of a little over 2. I have attempted to reduce weight, however due to the requirements of the drone there is no chance I can get it below 1kg because of the components required I also can’t make it bigger due to size requirements.
To try and reduce noise I’ve tuned the PIDs way down, far lower than what is recommended in the initial tune documentation. This is shown in BIN0004, however increasing them close to their standard values didn’t have much of an effect on noise. and I’ve enabled harmonic notch filtering and FFT. The only other thing I can think of is the PD balance may be wrong
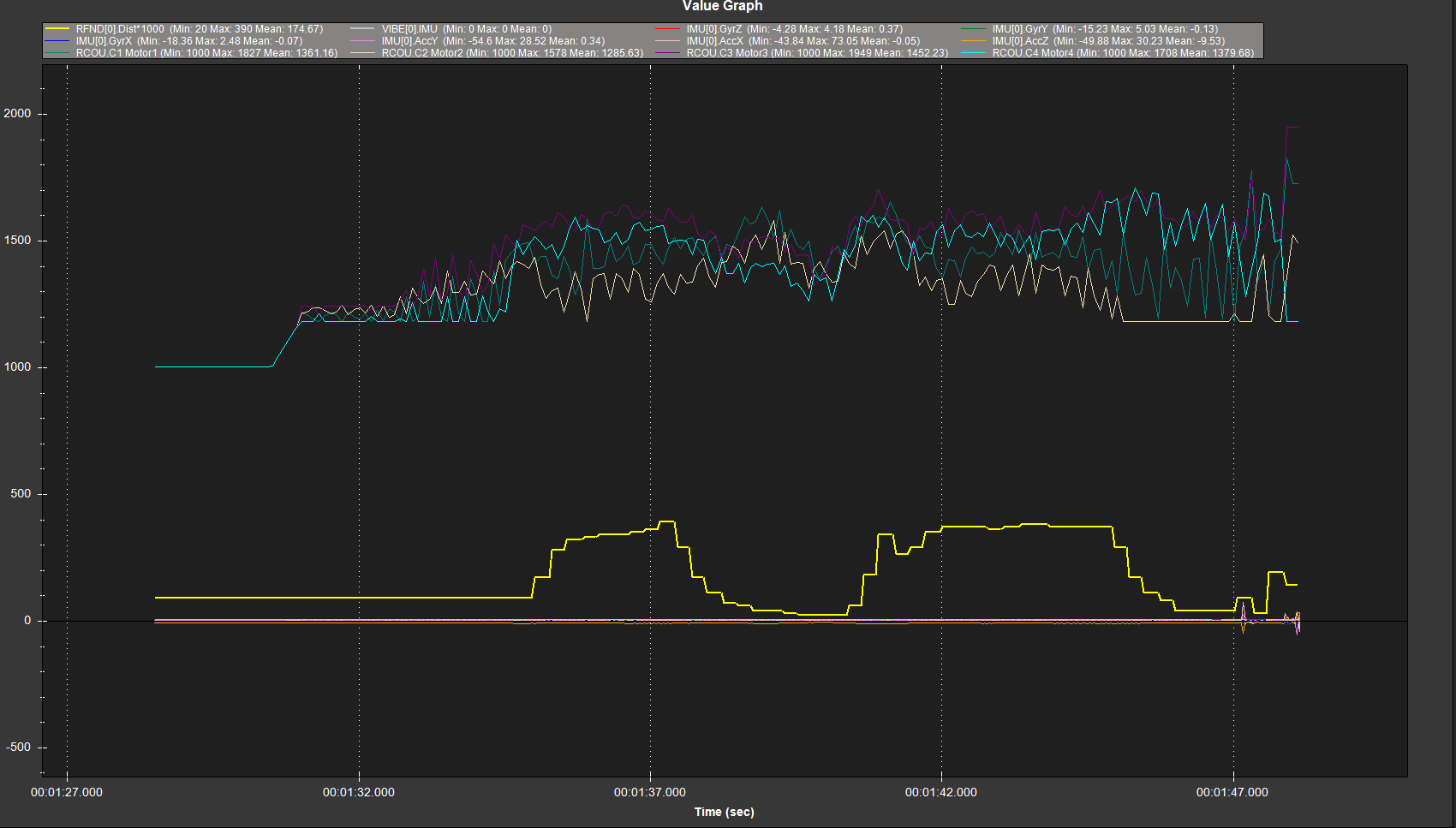
Another strange thing in the last flight was that after about 10 seconds the drone started to uncontrollable yaw, and this can be seen in the logs as motor 2 decreases throttle significantly. It was however much worse before when I had the compass enabled, the drone wouldn’t even take off because it was intent on full yaw to starboard and ended up pitching over its nose. Since disabling it these problems have gone away. There isn’t a GPS module on board since the drone is designed for indoor use where signal would be somewhere between bad and non existent, so control is handled solely by the IMUs and Hereflow optical flow sensor.
The ESC signal wires are routed a little too close to the motor wires which could also be an issue, however they are running dshot 1200 which should reduce susceptibility to EMI. The drone is very compact so this is inevitable to a degree, but the signal wires could be moved a little.
At this point I’m running out of ideas and time so any recommendations would be greatly appreciated!
Most recent parameters
2024-04-22params.param (19.9 KB)
Most recent log file
00000005.BIN (584 KB)
Log file with very detuned PIDs
00000004.BIN (572 KB)