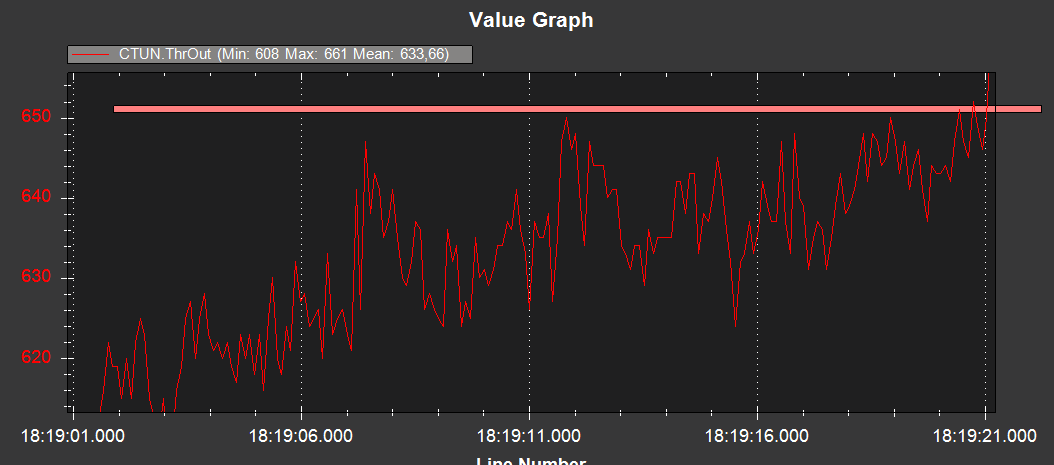
What do you mean? The throttle hovering is at 60%…
Also it might be a weird question but: are you the creator of eCalc? It might be a coincidence but just after my mention of the motors and battery in a message above, that motors and battery became unavailable to select in the free version of eCalc!
Tell me now What exactly I did wrong?? I selected good motors with good propellers, yeah maybe not the best battery, but I have another big battery that doesn’t fit the frame and is too heavy!
Ha, no. That would be Marcus Müller from Switzerland I believe. I’m a yank here in the US. I don’t know the man I just like his application.
You did nothing wrong. The performance you are getting is what you should expect like I said.
I can repeat the obvious if you want more flight time with a 1.45kg quad.
Lower kV motors, bigger props on higher battery power. Where is the mystery?
No, no help at all. Some might argue that you could use Dshot with newer ESC’s (not supported in 3.2.1 of course) and realize a tiny increase in efficiency but you are already underwater with thrust/weight so it would be no help at all. This thrust/weight has to be rectified or you don’t have a stable craft. You would have to drop the Take-off weight down to 900g for it to be right with that group of components.
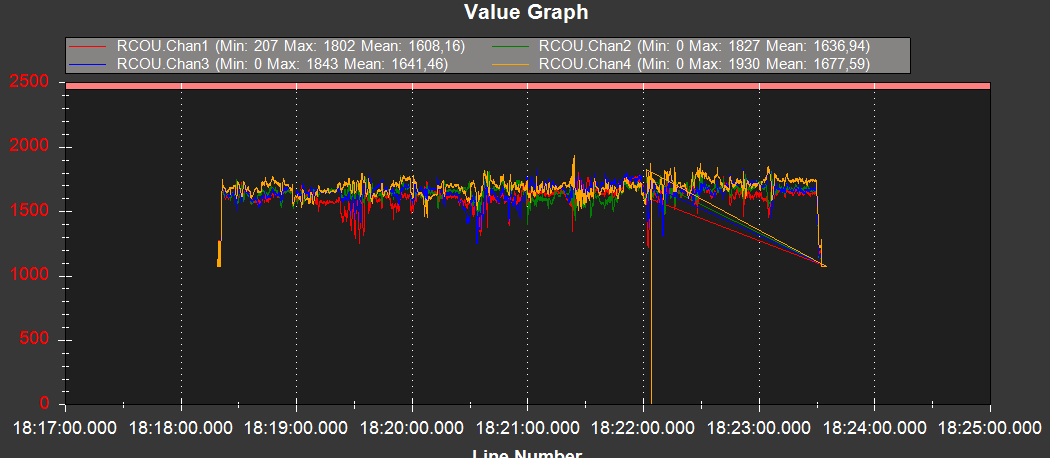
Not much to see in that log. There are so few parameters logged in that old version of firmware. The tune is very poor (graph Pitch vs Des Pitch) with a huge amount of overshoot. If this was a late version of Arducopter I would say increase the D term but honestly I have forgotten how to tune those old APM’s You can try Auto Tune but it doesn’t work very well in 3.2.1 and I think it’s futile until you fix the thrust/weight problem. If you do I would set the PID’s back to default. This size craft should fly OK on defaults.
No. You realize diminishing returns as you add more battery capacity due to increased weight. You don’t want to add weight you need to reduce it. If your hover throttle was <50% you could add capacity back up to 50-55%.
THAT is the issue, I can’t reduce weight, not me, my drone
Everything there is on the drone I need, in one way or another. Fpv, controller, motors, ESC’s, camera, gimbal, etc… I tried buying the absolute best battery regarding mah / gram of weight.
The big battery gives me even less flight time because of weight and overheat motors a lot.
The issue is you didn’t build a 1.45kg quad copter that would fly more than 5-6 minutes. As I have said many times now it’s completely predictable. You have a 500mm frame, why put 960kV motors and 9" props on it on 3S? I fail to understand what you hoped to achieve by that. I have a 500mm quad with 380kV motors and 13" props on 6S. I planned it to fly for ~30 minutes and that’s what it does.
Mr Dave,youve got this old head of mine thinking which is very bad for me,I have a heson 450edu that im sure would take 12inch props ive got 6s 3300 batts so i would need say something like a 440 kv motor to get the same as you 30 mins,keep that fertile mind of yours working Dave as keeps me planning ahaed and thank you
Hi Marty-Good to see you back in the forum! If we assume a take-off weight of 1.45kg like Yaroslav’s craft a couple motors could work on 6S with 12" props. GARTT and DJI make a 3508-415kv that would be about right. But with 3300mah I would expect more like 20 minutes of flight time. I have a 6S 5000mah on my 13" propped craft. I actually had a 8000mah battery on this quad at one time. It crashed and damaged the battery. It was one of those low C (10C) batteries Hobbyking used to sell which were relatively light for the capacity. That thing flew for almost 45 minutes.
Thanks for that,ile look ar getting the motors/esc’s as will need new 6s ones once ive got the motors/esc would get a couple or three 5/6000 batts but gives me great ideas and cheers
With the Hexsoon 450 the props it comes with are 10 inch, and I’d be doubtful it will even take 11inch, and especially not 12 inch, since 11inch props would be starting to overfly the base plates and cause extra vibrations.
To take bigger props you’d need to buy longer arms from one of the newer Hexsoon kits, or 3D print new arm mounts that extend out of the base plates to move the motor mounts further out.
And of course, as you are already discussing, different motors would be required.
FYI: a 4in1 ESC saves lots of weight, even though the original ESCs in the kit fit inside the arms. The 4in1 ESC can also take the place of the PDB that comes in the kit but you’d need another power brick, or just piggy-back them together (PDB and 4in1 ESC).