Have you set FOLL_ENABLE = 1?
Hi Tim,
Yes.
That’s why something the query because it’s all set up right and I don’t get the FOLL_OFS_X, FOLL_OFS_Y and FOLL_OFS_Z.
Hello Sir,
I want to create a beacon for my graduation project. Since my budget is limited, I would like to build the beacon using your materials. Could you please tell me which parameters you modify? Also, what should I do to make the ground control station recognize my setup with the Matek flight controller as a beacon? I would really appreciate your help
I wonder if enabling Q_WVANE_ENABLE would affect the heading when using plane_ship_landing.lua?
Hi everyone!
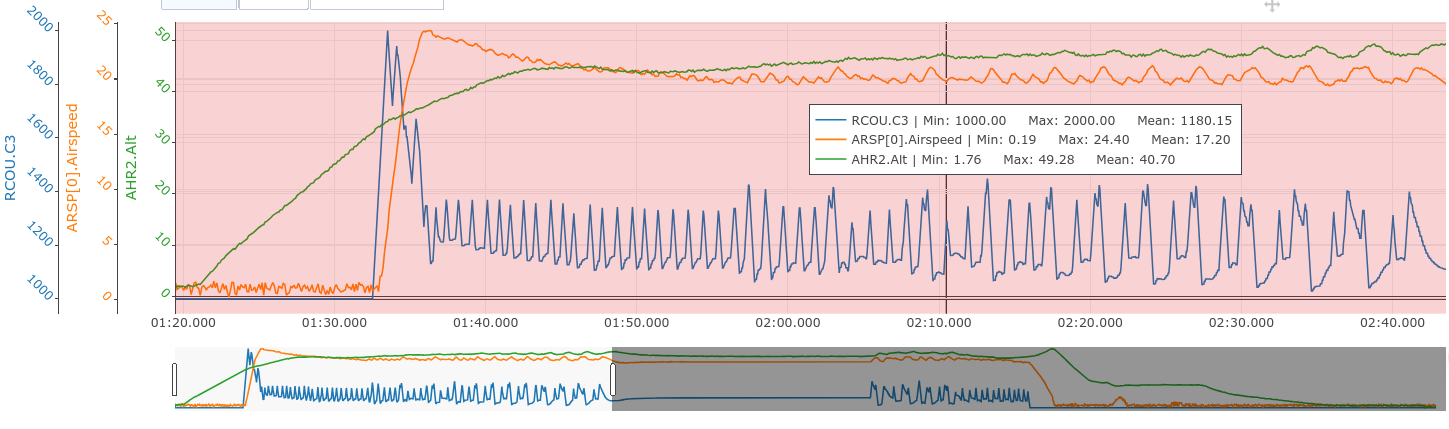
Recently, while using the plane_ship_landing.lua script, we observed abnormal throttle behavior during the fixed-wing phase of flight, and the same issue were able to reproduce during in SITL. Our ArduPlane version is 4.5.6.
Has anyone else encountered this issue? Any suggestions or solutions would be greatly appreciated. Thank you!
Something in TECS->attitude cascade is badly tuned. Post a log.
Of course, please check thisship_land_test
We are using the default parameters and have not made any modifications to the firmware on SITL. Any suggestions would be very helpful.Thank you!