You need to use the latest ArduPilot firmware for that to work. Update your firmware.
Sorry I forgot to provide the firmware version of my cudbe orange
My firmware version is ArduPlane V4.2.0
When SITL is unlocked, home no longer moves with the Moving Platform (ship sub), but stays at the current unlocked position
Run the sitl simulation, when unlocked, the home point no longer continues to move with the Moving Platform (ship sub), but stays at the current unlocked position
Reference URL:
https://ardupilot.org/plane/docs/common-ship-landing.html

I have the following 3 problems
- I would like to know what software other people use as a simulator.
The sitl of my experiment is set up according to the following URL: Using SITL — Dev documentation
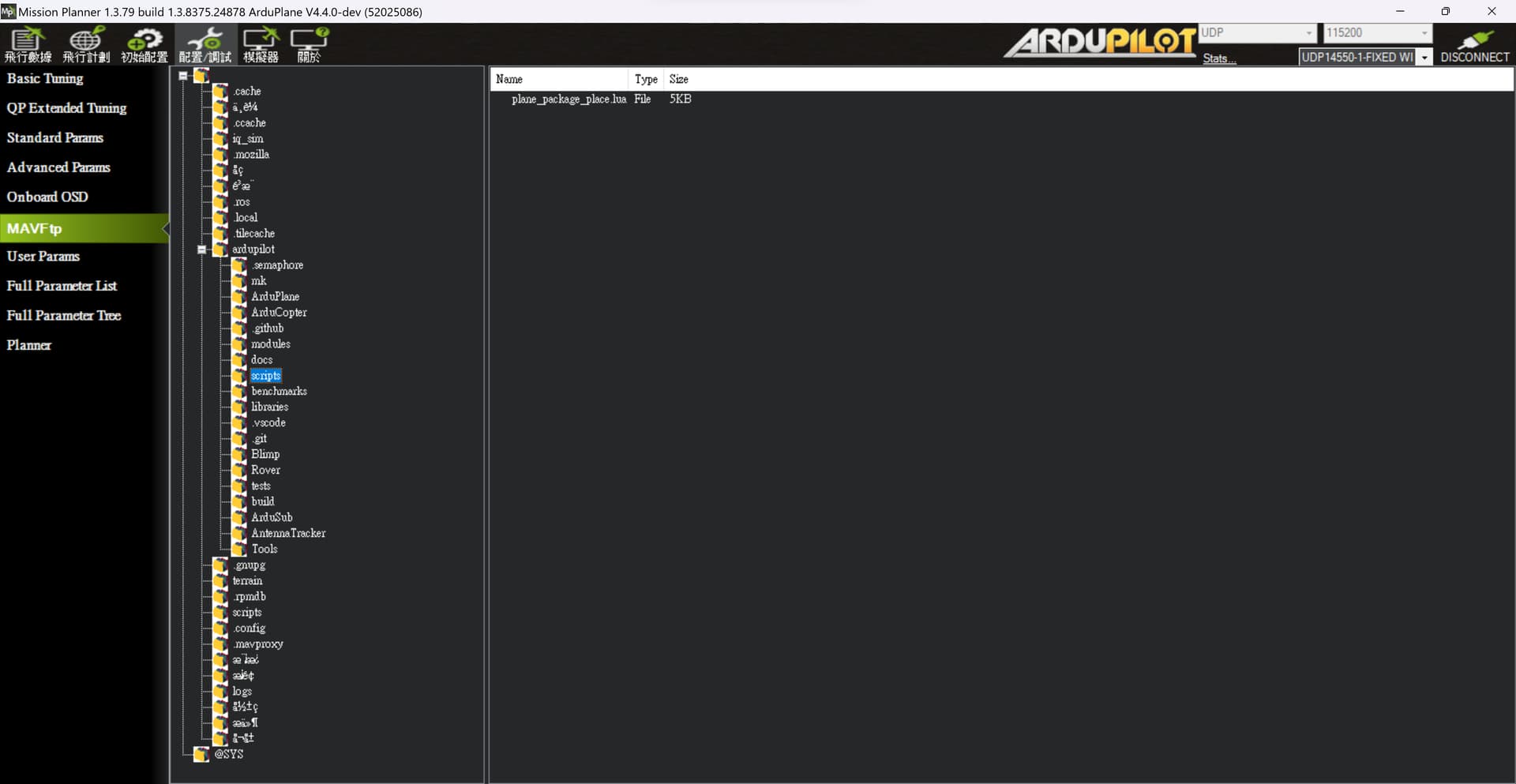
I’m wondering if the simulator is different, it may affect the lock when the home point is unlocked, and it will not continue to follow the sub movement. - I use STIL to simulate the teaching example of Moving Platform Takeoff and Landing (Ships, Trucks, etc.), the ship_enable parameter does not appear at all, reboot or refresh does not improve, make sure that plane_ship_landing.lua is placed in /home/user/ardupilot Under the /scripts/ path (as shown in the attached picture)
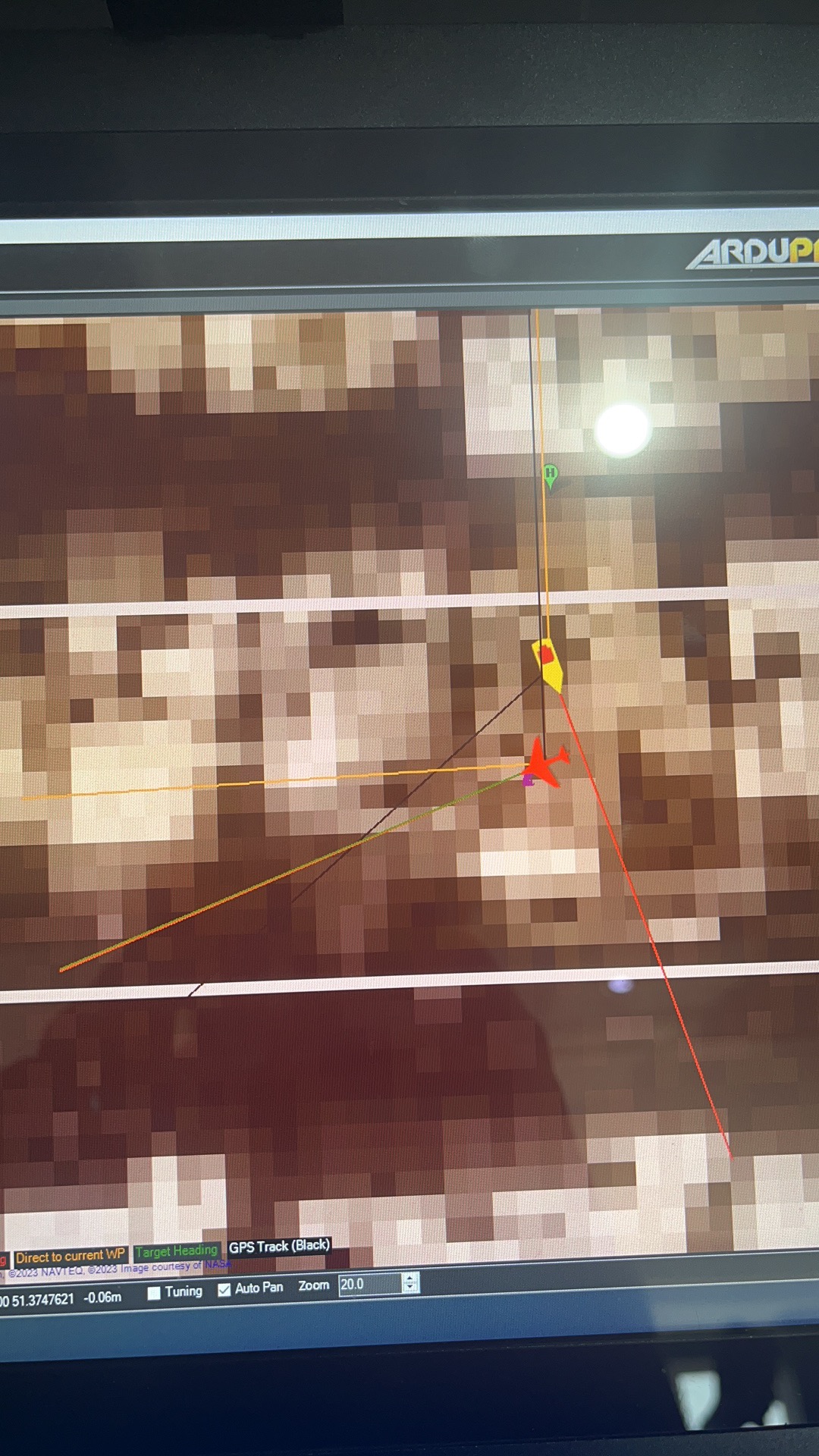
- When I use SITL to simulate Moving Platform Takeoff and Landing (Ships, Trucks, etc.), I execute the unlock command for the aircraft, and the home point will stop directly at the position where the Moving Platform (ship) moves when the unlock command is issued, not Will continue to follow the Moving Platform (ship). If you continue to execute auto mode, because the home point is no longer moving with the Moving Platform (ship), the aircraft will RTL back to the home point instead of moving with the Moving Platform (ship).

Thanks!!
Thank you, your advice is on point!!
SITL section:
If the ship parameter does not appear in the loaded scripts file, delete it and reload it again. I can successfully get the script file by doing this.
Hardware flight control part (cube orange):
I installed the latest version of arduplane (version 4.3.5)
The script file can be loaded successfully.
Hi everyone,i am using ship landing for my vtol and when i connect the aircraft and beacon, there is no home icon in my ship landing icon,what is the problem?
Please post the .bin log and describe your setup in more details (at least hardware used and how it is connected), without that we can’t tell what is wrong.
Hi everyone ! Amazing project !
I’ve been playing with the sim_ship parameter for a few days now, especially in Copter. I used to work on copter V4.4 but today when I updated to V4.5 I found out that the sim_ship vehicle creates another copter instead of the boat it used to create. Even if it seems to work the same way (the copter circle according to the parameters we set in sim_ship_*** and the copter initiates on the deck as before)
Hello A.Larribau,
Do you have FRAME_CLASS=2?
Thank you.
Hum no I was on frame 1 “quad” and type 0 “plus”. But I just tried it with frame “2” and same issue

while with AP Copter 4.4 :
Am I the only one with this issue with sim_ship with AP 4.5 ?
@tridge , one question,
If RTL_RADIUS defines the radius of the loiter circle during “hold-off position” >> how can I configure one diferent distance to BEACON for the back transition?
Hi, it is also possible to do it with one low-cost project assuming 50 cm position error

Preparing home video montage
3 Likes
nice setup! Do you have videos of using this?
 AutoTakeoff & AutoLanding with Arduplane")
6 Likes
thanks! really good demo
Hi
What’s your ground beacon setup ? Could you share what all equipment’s you have used to make the ground beacon ? Would really appreciate it
This is my beacon:
- Matek F405 Wing
- ESP8266 wifi module
- 2ud GPS WS-M181
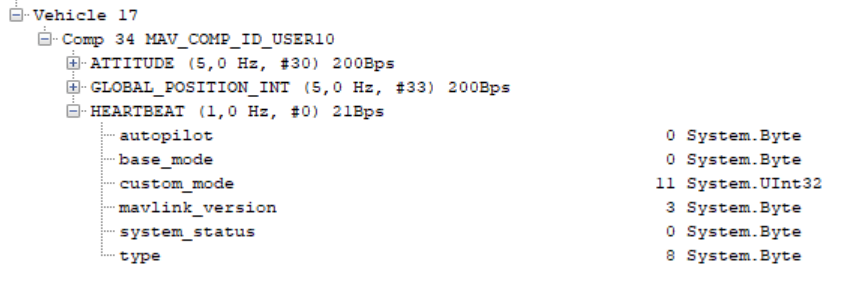
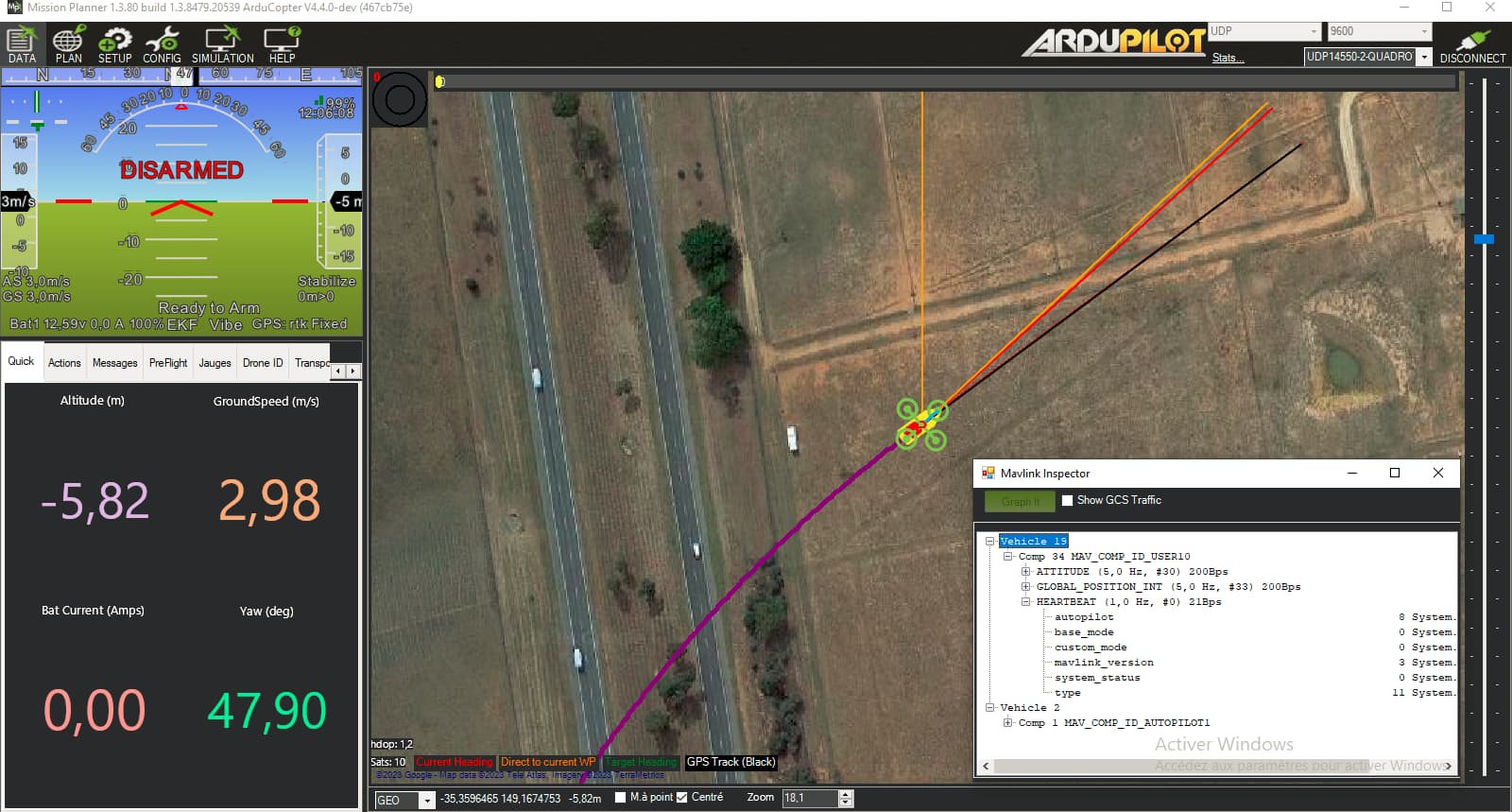
I checked the GLOBAL_POSITION_INT rate (Mavlink Inspector > Show GCS traffic) and transfer rate via wifi is similar to via USB.



4 Likes
Hello frnds
After connection with beacon…aircraft altitude around 16meters… after takeoff also the climb rate was very less

Hi all,
I am running the ship simulation in Ubuntu 22.04 as demonstrated by @tridge . I tried running ship-quadplane-landing.sh and mavproxy-multivehicle.sh and tried to take off the alti_transition_quad but it did not take off in the gazebo environment. I am getting no beacon message. I understand that the simulation works only when the plane recognizes the ship beacon but I don’t know how to enable the ship beacon. I need some help in figuring this out. If there is a documentation on running this simulation that would also be helpful.

Hello,
I can’t get the FOLL_OFS_X, FOLL_OFS_Y and FOLL_OFS_Z values, I have everything set correctly.
I have a mesh using three RDF900+, in the beacon I have ardurover 4.5.4 (master), in the plane arduplane 4.5.4(node 2) and the modem connected to the CGS (node1).
In Mission Planner the connection is correctly made and “Have a beacon”.
I right click and click Forward Between Links but I don’t get the values of FOLL_OFS_X, FOLL_OFS_Y and FOLL_OFS_Z.
The SHIP_AUTO_OFS parameter is set to 1 and does not reset to zero, so I don’t get the position between beacon and aircraft.
Any suggestions as to what might be going on.
Thanks.