I have an ARWing and a servo was damaged in a crash where the gear stripped.
I replaced that one cheap analog servo with a digital metal gear servo. I knew I should probably replace them both, but didn’t because the wire was too short and I had to solder a bunch to replace the first one. I am using Ardupilot and it was set to auto-trim, so I figured it would just adjust quickly and learn the new settings.
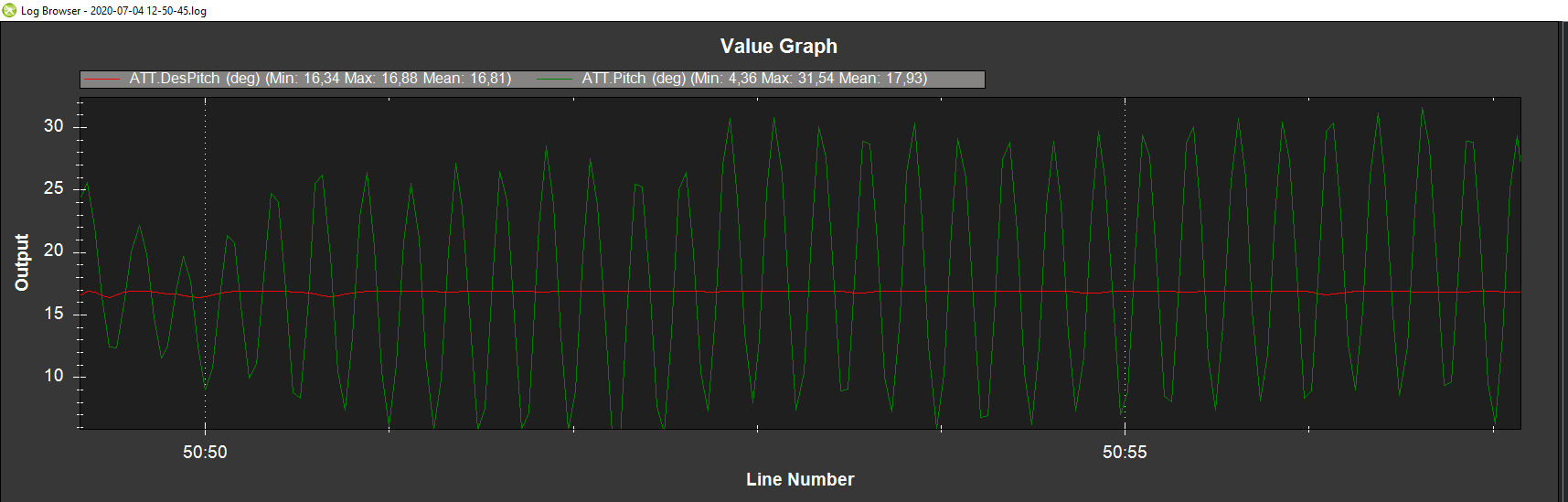
I flew it and it took off, then started shaking badly. It was strange in that it didn’t spin or anything, but was shaking up and down. I could see the wings “flapping” like the elevons (perhaps both of them since it was flying straight and level) were going back and force in a quick cycle.
Is this the expected result of having two types of servos? Or could something else have caused it?
looking at your params, you’ve already got your pitch P reduced to 0.525, the elevon servos are set to use extended ranges of 900-2100 however. that doesn’t really match.
hard to tell to what exact amount the actual servo replacement adds to this issue, however it’ll likely make things worse if both elevon servos’ travel and linkage geometry don’t match sufficiently well.
i’d suggest to check your mechanical setup for matching servo travel and linkage geometry. i personally don’t really ever set the servo travels any higher than default of 1100 - 1900 on control surfaces. maybe set them back there, reduce pitch P a little more to start with and check if you can get your wing flying well again like that. i’d be conservative on the pitch P first to slowly raise it back up again depending on flight performance.
on a sidenote, you’ve got all arming checks disabled, is that intentional?
That was helpful, thank you. The flight looked exactly like the video that you linked to. I lost altitude and it flew lower than it was supposed to.
As for why I had 900 to 2100 - could auto tune have done that? I don’t know that I changed that myself.
I am lowering my P settings. I put in matching servos and will redo the linkages. I turned on safety checks.
My plan is to take off and loiter. Then do rough autotune while it just circles. I think that will allow it to change the P settings and auto-trim. Then trigger a landing mission.