Any ideas on getting this quad stable? It’s currently running stock PIDs. As you can see it jumps up with only a bit of throttle and is very difficult to control.
Post details of this quad and a flight log after getting rid of the tether. This is not useful in any way.
This is not useful in any way
kinda useful, as in alt hold with such vibrations arducopter may give full throttle to motors and model will propel into the sky. ![]()
i will post here link top leonard`s article/response on how to tune it. i sent it somewhere before - it relaly has to be added to all FAQs for ardupilot.
found it - here it is.
2 Likes
Here ya go 
http://arduplotter.com/view/5b68a907f467cd60758795bd#imu
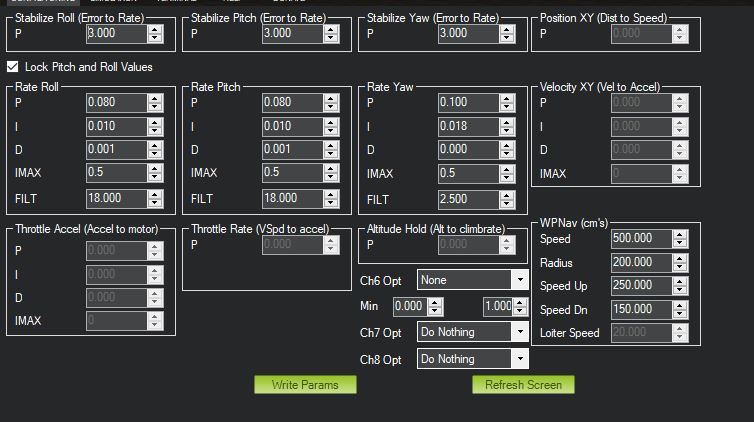
This is a quick arm, throttle up to get it hovering, then the vibes kick in, and bringing it back down. Here’s my current PIDs. Everything is as low as it’ll go.
This log is with a 8ah 6s pack. I tried a 4ah 4s pack and flew in stab and poshold no problems. It definitely seems like the Ps are too high for the power, but lowering them seems to make no difference.
Pls read the article i posted - you most likely need to play with filters frequency and just follow what Leonard stated in there.kakutef7_07_29_6inch.param (17.0 KB)
or look into my params i attached here.
Turns out it’s the props. I put some 9x4.5 and flew no problem. I previously had 10x5.5. I’ll try 10x4.5 next.