I have built a long range liion drone (AUW 2.8 kg, battery 6S6P 20 Ah, 380 Kv sunnysky 3508, 13 x 5). it flies quite well, has an endurance of 80 minutes/45 km.


It runs on ardupilot.
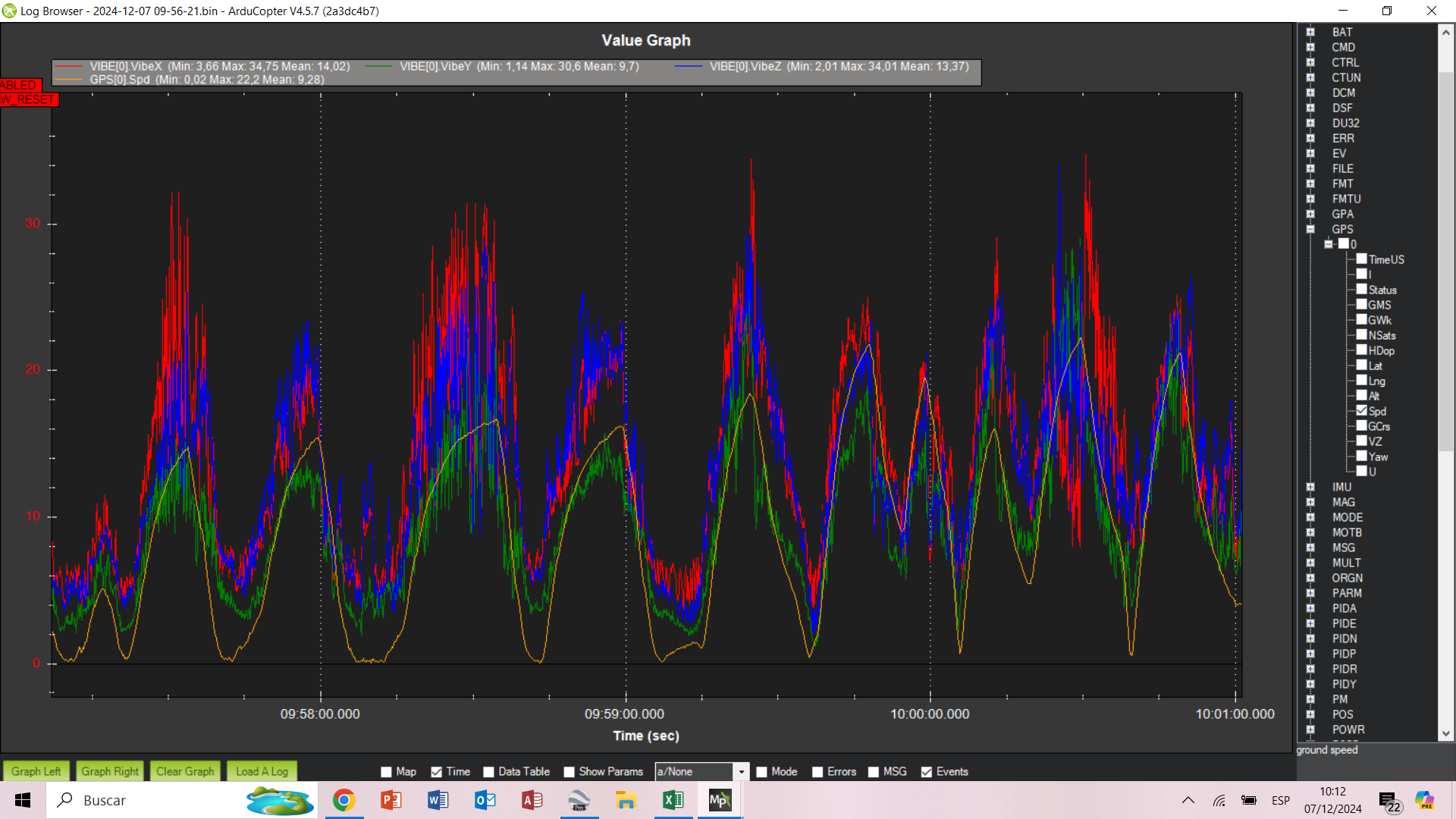
Now, I have run into a problem that with an increase of speed, the vibe values increase.
On hover or slow speed, Y vibe and Z vibe are low (5) and X vibe around 10.
On medium speed 50 km-h, Y goes up to 10, and Z and X go to around 30.
On high speed 80…110 km-h, Y goes to 20, X goes to 40, and Z to 80 and even higher.
On one occassion, I have lost control, the AP gave something like a vibe reset, the whole thing seemed to have lost control, but then somehow recovered.
This behaviour seems not to be related to the power of the motors, but rather horizontal speed. On the occasion where I lost control, I was very high, and decided to dive down in acro mode, GPS speed accelerated to about 110 km-h, but the motor current was around 12 A, which is about the same as needed for hover.
I am not sure where the problem could be. The arms are not particularly strong (front arms are 16 mm diameter, 1 mm wall thickness, and rear armas are 12 mm diameter, 3 mm thickness), and they are somewhat flexible (you can twist the arm if you grab the motor), but at low speeds, and even high power (like in a climb at 6 m/s) the vibe values are low. So I am not sure if this is the cause of the problem
Today I modifoed the FC suspension, adding a 1 cm. foam padding. Then i flew around accelerating and decelerating. The result of the padding seems to have reduced the vibes by about 50 %, what was going up to about 50 60 at a given speed now is around 30 … 35.
Still, I have rather high vibe numbers when flying at higher speed.
Also, when flying forward, the X vibe is much stronger then when flying backwards at the same speed (speed cycles on the graph 1 and 3 are forward, cycle 2 and 4 are backwards).
When flying sidewise the X vibe is average.
I am inclined to consider stregthening the rear arms, but still not sure. I do not like the idea, because it will introduce more weight and will reduce the endurance. The whole quad weighs exactly 1000 grams empty, of which the motors with props take up 500 grams.
I am not that bothered by the flight behaviour in the normal speed range, i.e. like flying up to 70 km/h or 20 m/s seems to function perfectly.
I am worried that if I have to go beyond that envelope, I may enter unrecoverable situation. That is especially true for rapid descents, since it takes ages to hover down (I feel like max vertical speed should not be higher than 2.5 meters), and the way to go is to slide down in acro mode, where I can easily reach 10…12 m/s vertical speed, but that requires a very precise throttle control so as not to go too fast horizontally,


