Hello, I have two questions about Omni vehicle.
I have the Omni vehicle as pictured and coupled it to a Pixhawk CUBE with Rover-4.1.3 firmware installed.
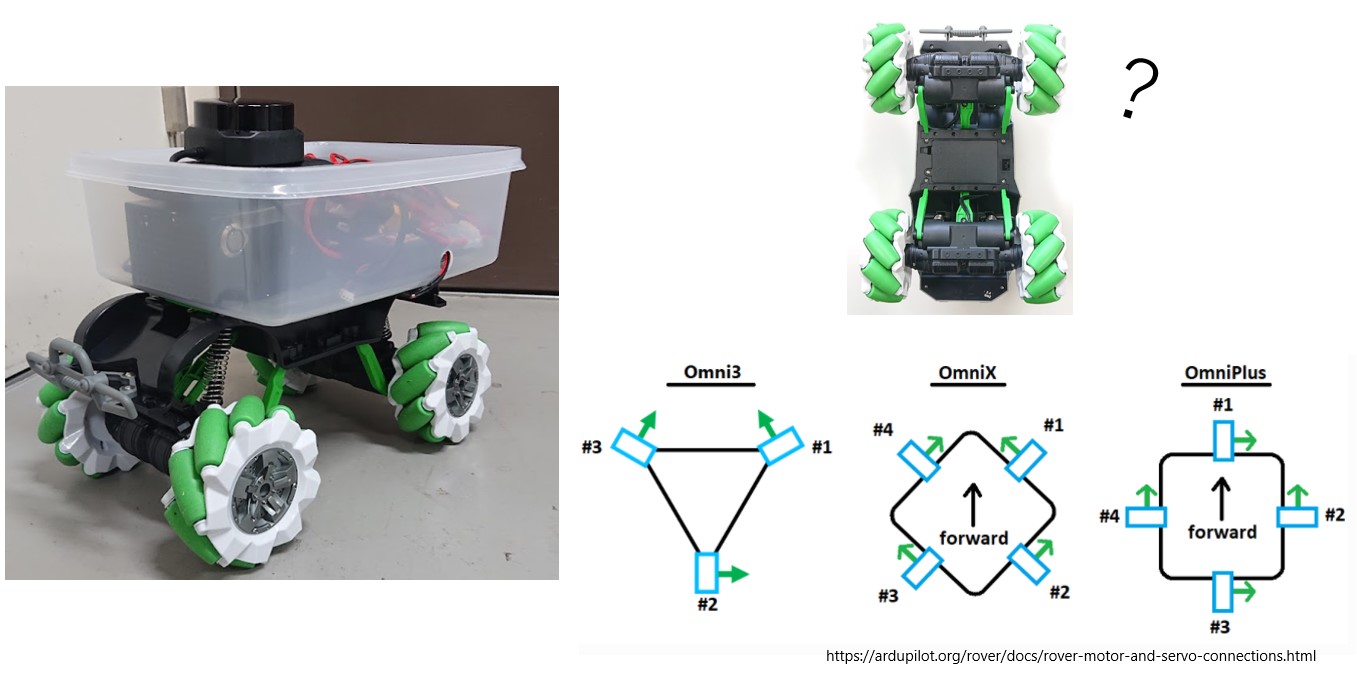
①
Which frame type should I choose for the omni vehicle in the picture?
I set it to “FRAME_TYPE=2 (OmniX)” , but is this the correct setting?
②
What settings do I need to make the omni vehicle move horizontally without turning?
I piloted this omni vehicle with manual controls.
I confirmed that this robot move the pivot turn action, but I could not get it to move horizontally.
OmniX is the correct frame setting for mecanum wheels. Ardurover currently does not use/support the lateral movement in any mode other than manual. By default, roll input controls turning, yaw input controls lateral movement.
I have been keeping in mind how we could add lateral movement support to Auto, RTL, etc. It is not included in the SCurve PR but I’m sure we will add this feature eventually.
Thanks to both of you for your replies!
I understand the frame type for my omni vehicle is “X”.
Compared to a skid steering vehicle and Separate Steering and Throttle type vehicle, the Omni vehicle can move horizontally while maintaining the orientation.
I have high hopes for the omni vehicle that can softly carry cargo in tight warehouses.
I hope that ArduPilot will implement moving Omni vehicles horizontally in the future!