we are very new to this. we are configuring a new boat with the cube orange autopilot. we are struggling to get it to steer and throttle up. we have configured the accelerometer, compass, calibrated receiver virtually all that was required prior to setting up motors and servos. we are using a minnkota motor with a servo to steer the motor. we have comfirmed the motor works with the ESC software. not sure what to do to get these functions to work.
1 Like
Are you sure the the FC is “ARMED”? Nothing happens until armed…
You may also need to disable the safety switch by setting the BRD_SAFETYENABLE parameter to 0.
Mission Planner’s motor test screen is also a good way to test the steering and throttle are working.
Yes it arms. We look at the logs Ch1 & Ch3 and the receiver is sending. Could it be our PWM setting could be out?
It’s probably best to post an onboard log. As we often say, “it’s all guesswork without a log”.
Was anyone able to figure out why my brushed DC trolling motor isn’t running from the log file I uploaded?
Txs for the log
Things look ok on the autopilot side. I guess the servo is moving OK?
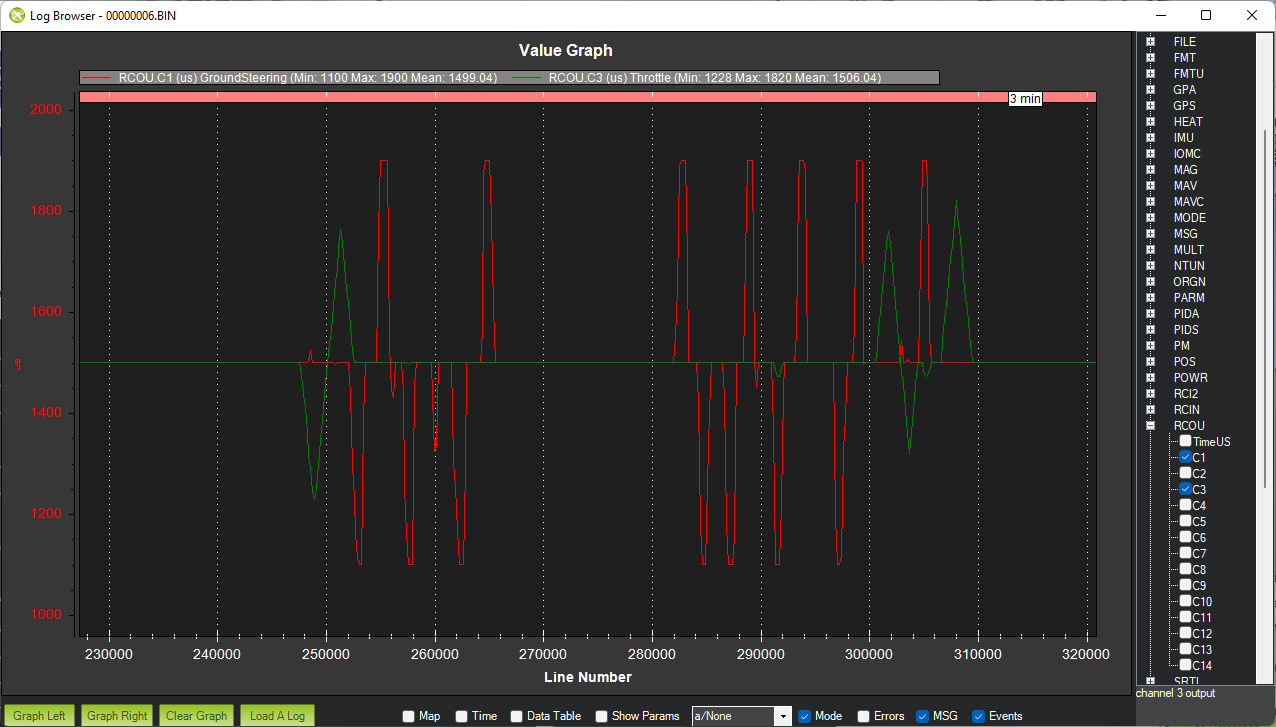
If the servo is moving OK then I think the problem is the motor control hardware (aka ESC). I guess you’re following the instructions here on the wiki? In which case I can randomly guess that the RoboClaw ESC hasn’t been setup quite right. Perhaps it’s not accept PWM input (which is what the autopilot is outputting) or perhaps it is expecting the range of the pwm input to be something different than what the autopilot is outputting (the autopilot outputs 1000 to go backwards at 100%, 1500 to not turn, 2000 to go forward at 100%). Below is a graph of the PWM output from the autopilot so the steering servo should certainly be moving. The motor should be turning on/off as well.
BTW the steering RC input (e.g. from the transmitter) seems to be off by about 100pwm. It’s natural resting position appears to be 1600pwm. The RC calibration matches (e.g. RC1_TRIM = 1600) so it’s no problem but at some point it might be good to fix the transmitter trims and re-do the RC calibration.

@fisheye62, I guess you work with TomD? or maybe you are TomD using a different user name?
I will look into this thank you for reviewing the log
1 Like
We are stuck working. the flipsky ESC is complicated to us and there doesn’t seem to be any support connecting it to a DC MOTOR. We can get the motor to work with the VESC TOOL. but when we arm the autopilot the steering work but motor doesn’t turn. Not sure if we got the params set up correct
have you ran the VESC motor setup wizard to setup your DC motor? VESC controllers won’t do anything until you have completed the setup wizard.
You then need to run the input setup wizard to configure the controller to use PPM input.
check your low voltage settings too, it wont do anything if it thinks the battery is low.
Thank you for your reply. Is there anything special that we have to to run the Wizard for a DC Brushed motor?
just set the max current to an appropriate level for your motor, you wont want to damage it with too much current.
When I tried to run the set up wizard I struggled with picking the correct motor we are using to set up being that it is a DC brushed motor
cancel that, I just checked the vesc software you dont need to run the wizard for a DC motor, just go to motors settings> General>Motor Type> and set it to DC.
I have never used VESC on a brushed motor before, only brushless I assumed the setup process was the same, the Input wizard to select PPM should still work the same.
Sorry to be ignorant but I can’t seem to find the tab for the input WIZARD
I am struggling with the input settings. Now I did set
It up with the wizard not sure that did anything to prevent the motor from running now.
you should be able to see the values in the wizard move with the output on ardupilot. do you have a rc controller or a servo tester you can connect to the esc to see if its reacting to RC PWM input.
I have a controller but not sure how to connect directly to ESC.
what receiver do you have?