I am porting a betaflight DARWINF411 fpv to use H743 Flight contorller. flashed copter 4.7.0.
I have done all the steps to prepare the drone for flying moving the motor wires to the same pad names S1,S2,S3,S4.
Done all the steps for initial flight: setting frame type x, defining prop size, setting radio reciver, channels, calibrating I imu and setting AHRS_ORIENTATION = 8 # ROLL_180(my fc is upside down with arrow facing front) arranging the motors directions and props using motor test.
after rearranging the “servo outputs” this is the outcome of the relevant params
SERVO1_FUNCTION=35
SERVO2_FUNCTION=34
SERVO3_FUNCTION=33
SERVO4_FUNCTION=36
when I try to takeoff pitch feels like role, role feels like pitch, I am having trouble controling the drone. what am I missing here ?
another strange behavior I noticed is that when I connect the mission planner the HUD display is responding very slow to changes in orentation of the drone. is this a normal behavior ?
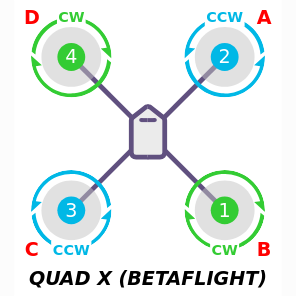
Try setting the frame to Quad X Betaflight - this should work with the standard Betaflight wiring, motor order and spin.
Thanks.
tried with FRMAE_TYPE=12 rearanged the motors.
the drone flips immidiatly when I push the throttle up. it flips in the pitch axes the nose goes up first and the drone flips towards the tail.
is it possible the imu is acting strange. I see the responses of the imu in the hud disaplay of mission planner. I feel like its very legy. is it expected ?
read somewhere I should change from ek3 to ek2. is it making sense ?
No, IIRC there is like one specific case where EKF2 works better than EKF3 and it is related to optical flow or mocap.
Mission Planner default HUD data update rate is quite low. If you do a snap motion does it go to the new position in few big steps or does it slowly converges over a few seconds?
Check that motor order and directions are correct.
Most likely the motor order and spin directions - only use MissionPlanner motor test.
Wire up the ESCs by the numbers, but test by the letters to confirm operation.
I have done the motor test again and again - the props and the motors are working as axpected both in frame type=1 and frame_type=12 it wont take off as I expect.
I am left with few options:
- componet malfucntioning - imu in misson planner is very legy. it takes 2 seconds until It updates the orientation on the HUD, the orientation is as I expect. is this know issue in mission planner ?
- I have flashed 4.7.0 is it worth going back to older versions ?
- is it possilbe that altough I see the orinetations in the hood as I expect there is a need to “fake” differnet value in AHRS_OREINTATION ? to get it to work ? currently my FC is installed with component side down and pcb arrow pointing to the nose. I set AHRS_OREINTATION=8 “roll 180” can this explain something ?
any ideas what to do ?
I have swiched to another h743 board. it seems the imu was malfunctioning. that is maybe the reason I have seen a delay in imu display on the hud.
now with x betaflght I am able to takeoff, only problem left is that the pitch is upside down. is it expected behavior ?
Pitch does usually need reversing in the transmitter for Arducopter.
Or you can set RC2_REVERSED,1