I have a slightly overpowered copter. Weight apprx. 500-900 g and theoretically up too > 6000 g thrust.
I noticed that either the P or D PID (or both) greatly increased the power draw.
Setting them too high caused a draw of 30 A in hover. This resulted in motor temperature > 80 degrees.
Lowering the P gain from 0.175 to 0.035 and the D gain from 0.0036 to 0.001 resulted in a decrease of the power draw back to 9-10 A.
Can the D-gain have an influence on the motor power draw?
I thought it may get caused by micro oscilations from the high P gain.
Hi, me too having the same problem.
P = 0.092 ; I = 0.067 ; D = 0.002
Quad weight - 1350 grams.
Motors get extremely hot in a 3 minutes hover. Waiting for the experts to comment.
I have no problems with similar sized copters and ATC_RAT_P values < 0.06.
What are your ATC_ANG_P values?
Well my ATC_ANG_P is 4.5. My guess is that this is caused by invisible micro oscilations. The problem is that this can destroy the motors :’( It would be however helpful if someone else can find out whether the D-PID can have an influence, because I think there shouldn’t be one.
Definitely oscillations. Usually you can also watch the VIBE_X and/or VIBE_Y going up significantly (in my case from around 5 to 20…40)
Indeed, the vibration have been slightly increased. I still wonder how the motors can become so hot.
After just 2 min it smelled as if the grease inside evaporated and even the arms of the carbon frame were hot as well.
Lowering the PIDs and they become just hand warm. Do you think there is a way to detect this on software level?
High draw:
17-04-26_21-15-10.bin (533.8 KB)
Low draw:
17-04-27_11-28-46.bin (1.8 MB)
Vibration is high in both cases. There is clipping in the low draw log. So maybe the vibration is the cause for the hot motors, i.e. stabilizing trhe copter, and not the result. For sure it is also related to the PIDs.
Interestingly there is a voltage spike in your “low draw” log. I just found the same in one of mine. Seen this before?
I missed the voltage spike. I have atm no idea where it comes from 
I was also never observing such a spike before. Maybe the only explanation are the ESCs. There is not much what can cause such a spike. Maybe I should solder some caps on the ESCs…
The vibrations do not make me wonder, as there was not much space to dampen the board.
Yes, strange! Same as the spike on your system the one on mine goes higher than the inital battery voltage:
Hi,
are you sure your components (motor, battery voltage, prop size) fit together well from a sizing POV?
Overheating motors could be the consequency of too high voltage for the motor or too big props.
I think aggressive PID settings can of course cause your copter to oscilate, and do more “corrections” than necessary, which can drive your motors to run at higher speeds than normal, but if the sizing of the components is right, even if an excessive PID would drive them into max speed all the time they would not overheat as they are operated within “safe” parameters.
If you would share your components (Motors, Battery Specs, Props) maybe that would reveal something.
Also, if you switched on RC logging (RCIN/RCOUT) it would be possible to see what rate the motors are driven to - helpfull to diagnose.
Hope this helps,
Christian
The weird thing is that I already made tests before on high throttle (90 Amps consumption) and the motors were really cool.
However on low throttle hover (30 Amps) the motors get hot if the PIDs are too high. Furthermore 30/4 Amps is well below the Specs of a single motor …
- 5S battery
- 6" TriBlade props
- kde2304xf-2350
- 30A ESCs
- 100 A Mauch HAL Sensor
- Pixracer
Maybe the props are too large for 5S?
In the FPV community it is well known that high D-Terms are supposed to result in high motor temperatures especially on those small and overpowered racers. Try to lower the D-Gain as much as you can (if you get too low you should see a “bounce back” effect after flips and rolls).
BTW - Cool machine - 5S, 6" triblade - sounds like a small rocket 
@Thorsten
I don’t think it is because the blades are too big. The motors do not get that hot if I put them on the bench an run the props at full throttle. They get hot under low load conditions when the props spin slow. Also keep in mind that the difference in temperature just by changing the PIDs is maybe 60°C or bigger (hard to feel by hand, but I often burned myself on the 3D printer which reaches 120 degree on the plate …).
@Arne-W
Do you know maybe what exactly causes the temperature problems? I mean how is it possible that the motors draw > three times more current just to maintain hover. Maybe the ESCs switch the motors fo too short, not resulting in movement but heat. What happens if the software would send an ESC 490 times a second alternating signals (0 and 2000)? Would the motor run or cast flames?
5S battery
6" TriBlade props
kde2304xf-2350
= 575Wats
these are 295 Watt for 15 seconds motors.
They will get to 137°C very quicky running like this, then burn out.
Yes high PID will drive the motors harder.
Running the motors flat out is ‘easier’ on the motors than constant RPM changes from high PID.
And as it seems you can fry them with 125 W per motor
Daniel,
I did some quick math - seems you might be able to solve your problem (i.e. bring the motors into “safe” operating parameters) by replacing yuor 5S battery with a 3S - that would ensure your motors are below 295W at any time - no risk of overheating anymore.
Or take a look at the attached chart from the KDE site:
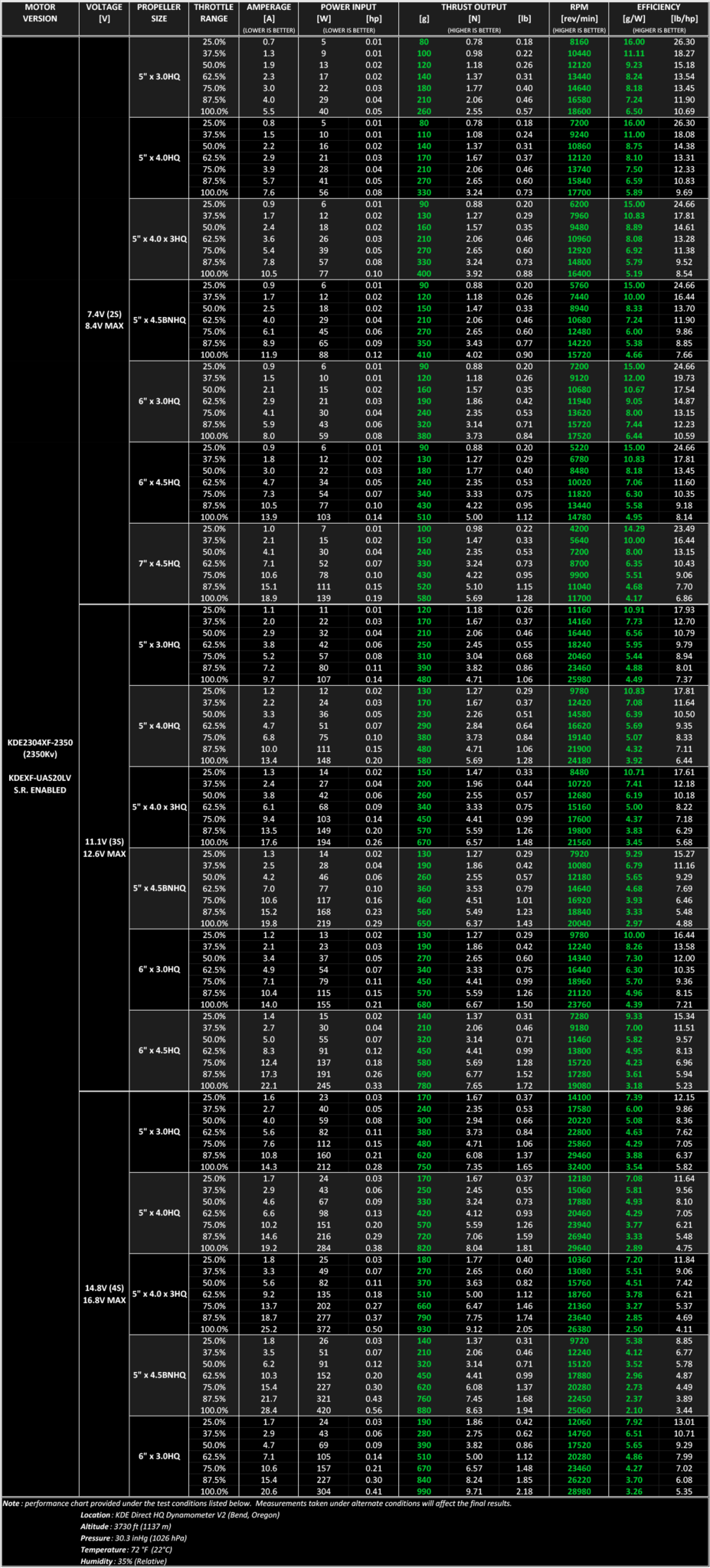
You’ll see some combinations proposed by KDE there - although to my calculations driving them at 4S with the 6x3 props is already beyond specification…
I’d say you are safe with your 6" props using a 3S battery or stay at 5" or lower for a 4S battery.
Hope this helps,
Christian
@Daniel_Frenzel The D-Term reacts on speed the error grows delivering some sort of “punch” in the opposite direction to minimize the error. High D-Terms give more of these “punches” on lower errors which leads to more energy delivered to the motor. If they are that hard the motor cannot follow they are just heating the motor.
And yes, I think you can burn a motor by giving 0% and 100% at 500Hz. As it will not turn all energy must be dissipated as heat.
@ Daniel, what esc firmware are you using and are you sure the esc signal range is the same on all esc ?
BLHeli_s with high timing as suggested for KDE motors.
Yesterday I made a testflight for around 15 mins and everthing was fine.
No heat with reduced D/P-terms.