I want to report a couble of things flying APM:Copter V3.6-dev (f0f7ca23) from yesterday.
The problem is, that it is a new build so it might be setup issues. But since the copter flies fine and I have other comparable copters I think I better report.
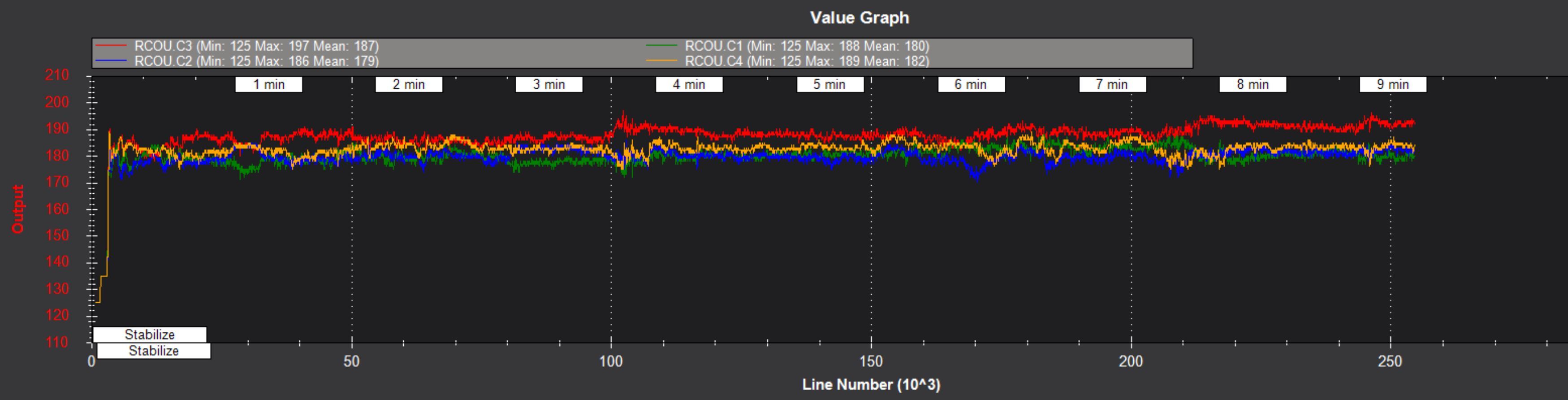
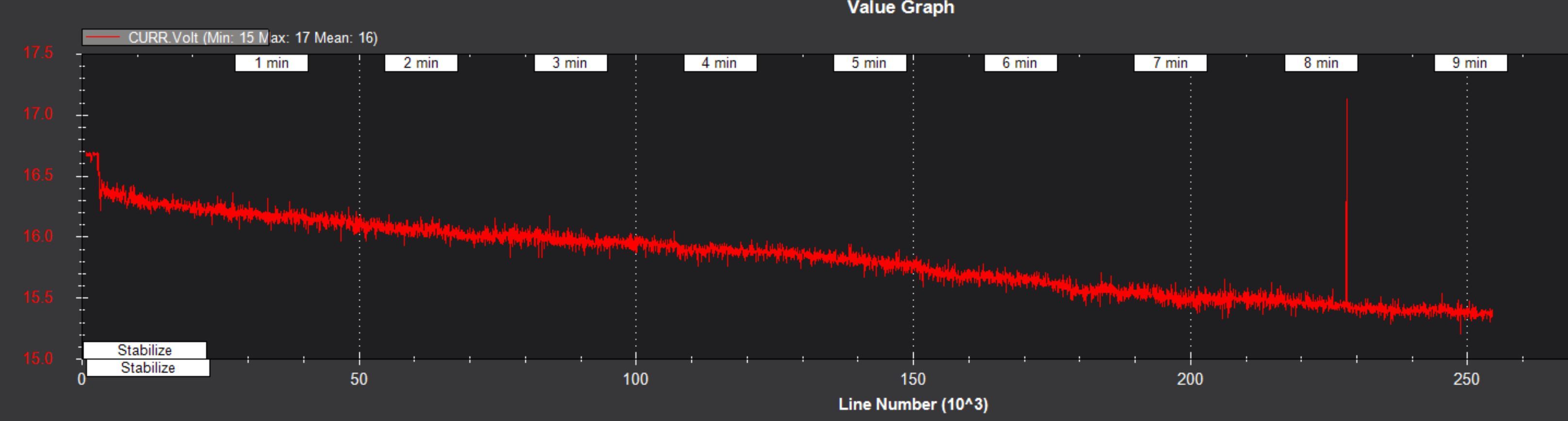
Today I made some “endurance” test with an overpowered quad (AUW incl. a 200g camera = 1.35kg, MOT_THST_HOVER = 21). The flight time was 33 min but the log ended shortly after 9 min. I never saw this before. A 24min flight yesterday was fully logged - as all other flights before over the last years.
Although GPS_SBAS_MODE = 1 and GPS_AUTO_CONFIG = 1 I never see GPS Status 4, which was usually the case. If I remember correctly there was some related discussion regarding a PR for the new Pixi GPS.
NLON. There are currently quite a few discussions about NLON. I am flying with EKF2 enabled and EKF3 disabled. On two comparable copters (different ESCs, M8N vs M8T) the NLON is different. On the first it is around 50 on the other around 200. On the one I was flying today (which normally has NLON of 200) I had a flight yesterday where after a battery failsave / RTL suddenly increased from almost 0 to 200. This was acually the only flight with such a low NLON. Is RTL more demanding compared to PosHold/Loiter?
Generally, should we worry about NLON of 200? I found a comment from Randy somewhere, where he mentioned that 50 is ok. I am also keen testing EKF3 but since this increased NLON to 600 (when running in parallel to EKF3) I hestitate a little. Anyway, I think I’ll make some test tomorrow comparimng EKF2 and EKF3 again…
Is NLON related to processor power of the autopilot ? What autopilot are you using that cause the high NLON value versus the one that has a low NLON value ?
Worth some more tests I guess (especially with current master, since there had been quite a few updates over the last days). Not sure if or how problematic the NLONs are and in which range. But the flight performace was always ok.
You could simply answer what is NLON no one ever heard about… NLon Number of long running main loops (i.e. loops that take more than 5% longer than the 10ms they should) NLoop The total number of loops since the last PM message was displayed. This allows you to calculate the percentage of slow running loops (which should never be higher than 15%). Note that the value will depend on the autopilot clock speed. http://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
Can Pixracer handle everything you want from it?