I like the landing gear with 3 legs - that is the most stable system.
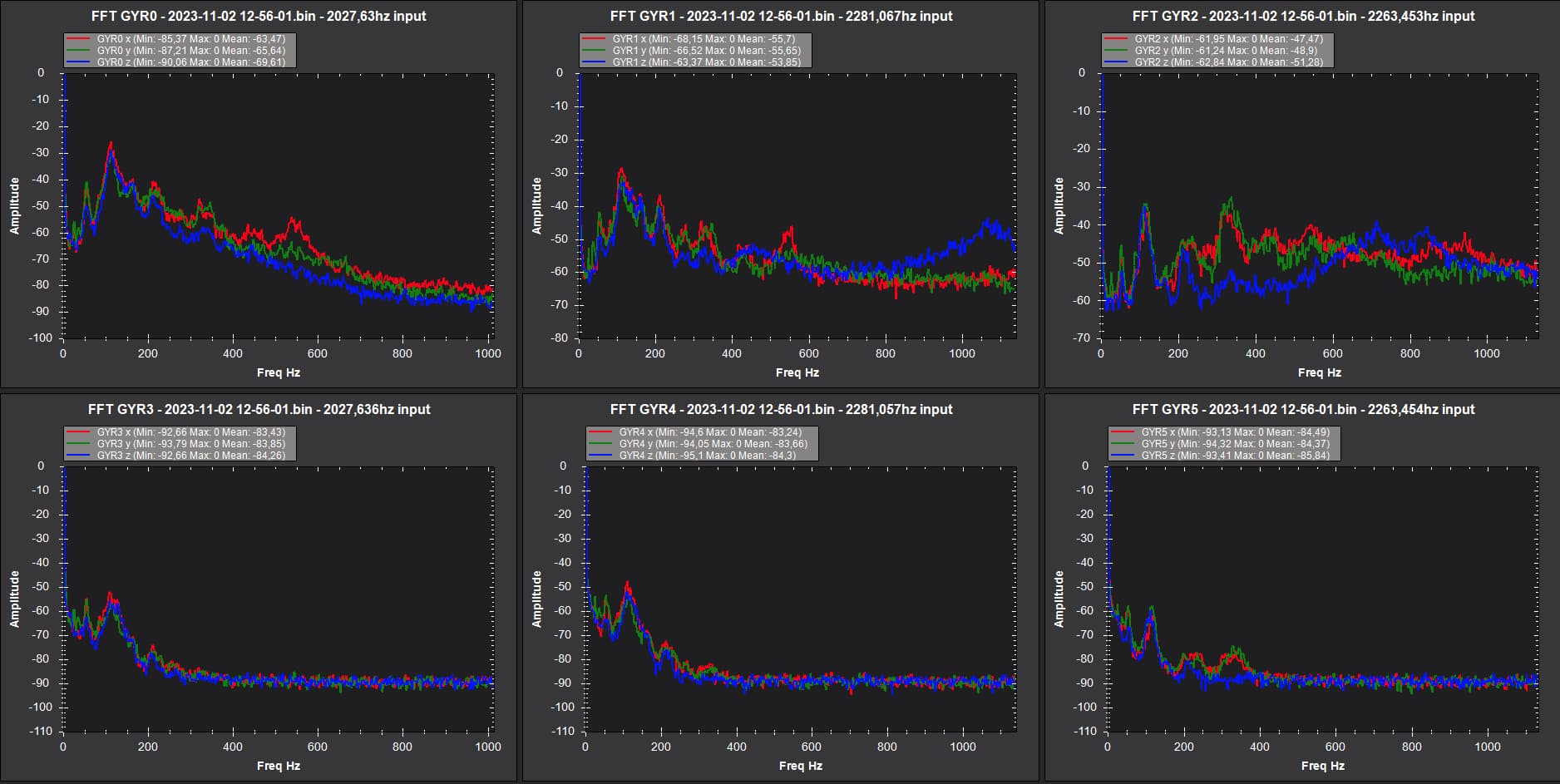
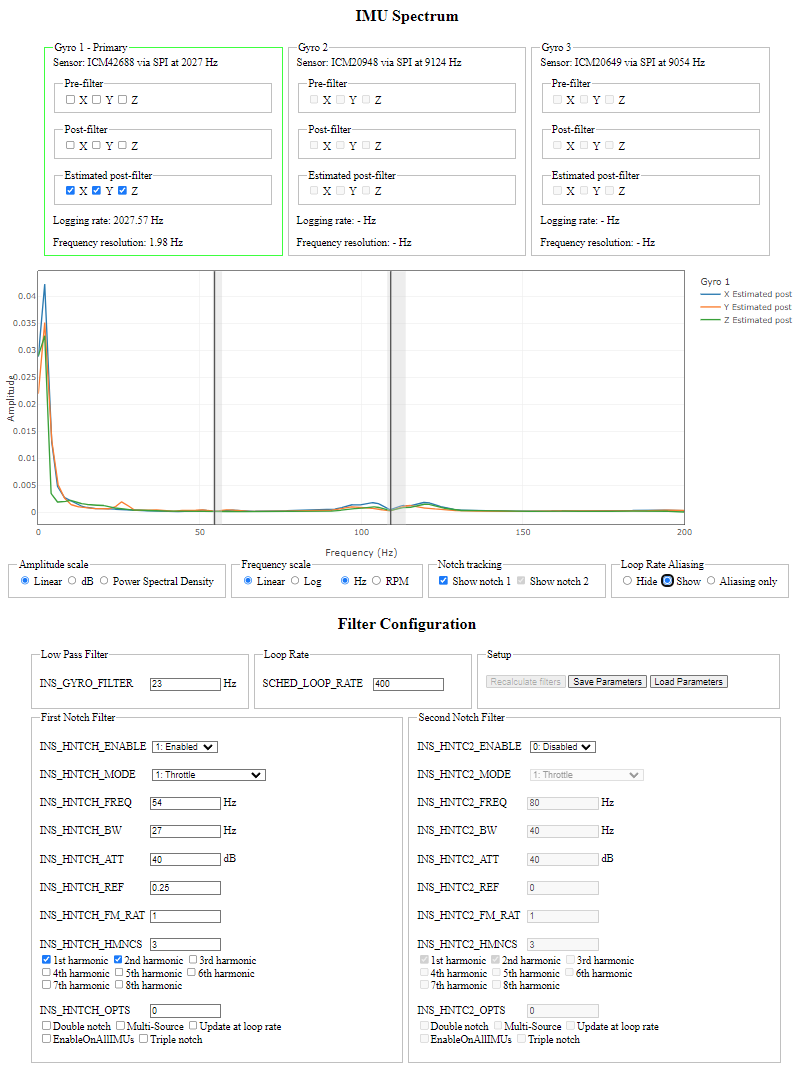
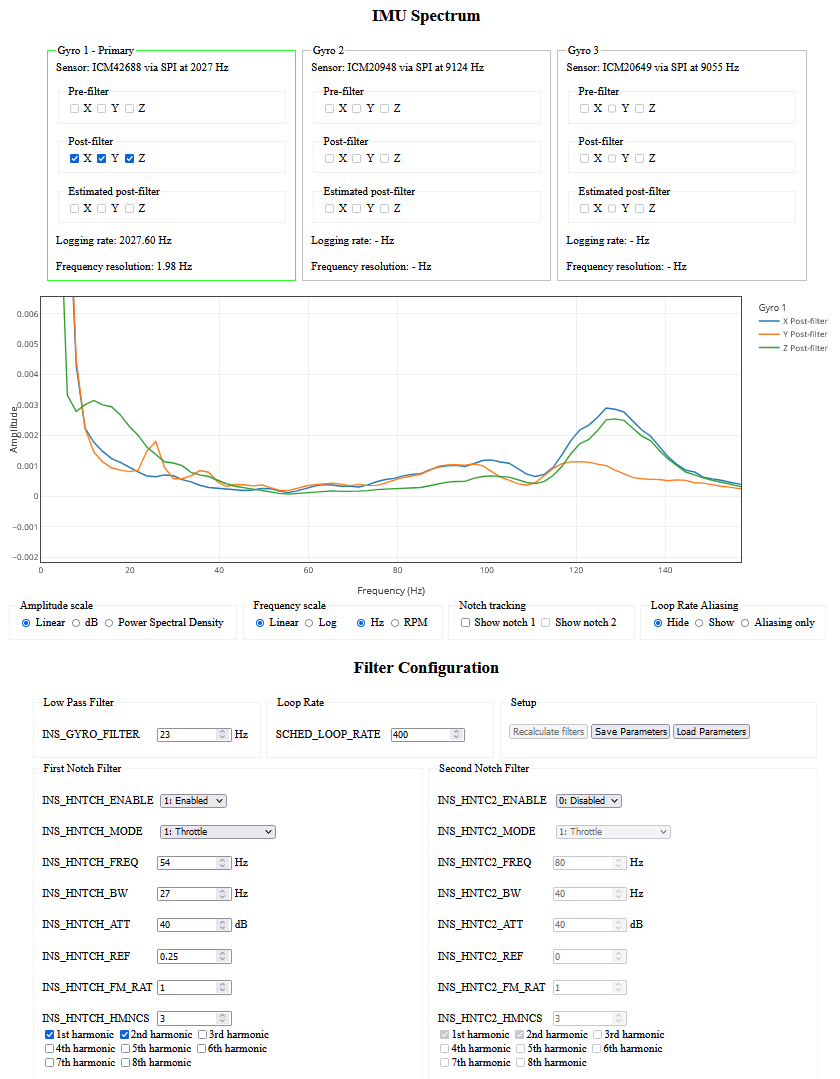
In flight the Z axis vibrations are getting up into a troubling zone at times. X and Y axis are somewhat better, but still not ideal.
It would have been nice to have the batch logging on - with a Cube Orange there is no detriment to leaving these set:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Definitely set those battery failsafe actions:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
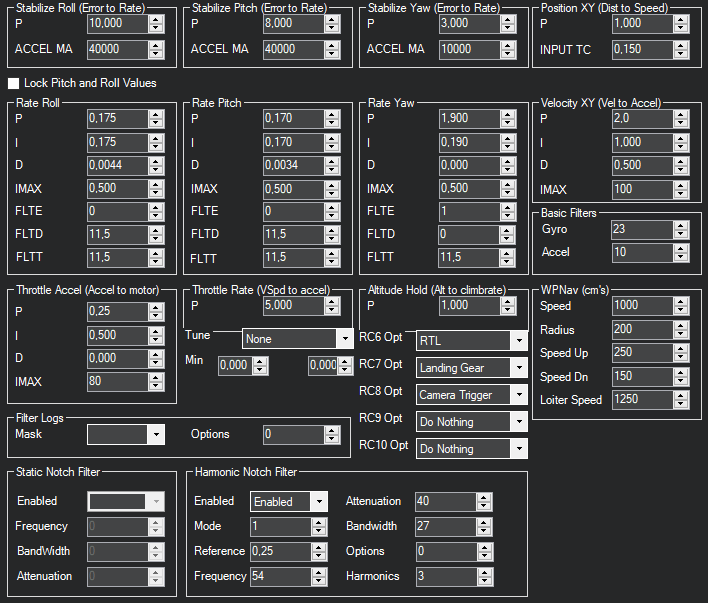
Motors are sometimes hitting minimum, which might not be an issue when you have a payload onboard. You could try setting MOT_SPIN_MIN a fraction lower to 0.11
For Loiter, try these and see what you think:
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
they are just half of default values, so easy to put back the original values if needed. This will relax the position holding a little, which may reduce Loiter’s sensitive behaviour.
Also give these a test, I always use these values:
LOIT_ACC_MAX,600
LOIT_ANG_MAX,30
LOIT_BRK_ACCEL,300
LOIT_BRK_DELAY,0.3
LOIT_BRK_JERK,300
I couldnt see what else might be causing an issue with Loiter, since AltHold was working so well and PIDs look good and seem to responding as they should. Maybe those vibrations are causing more of an issue than you expect.