Thank you for your answer, I will try new parameters soon, if it doesn’t help, I will also make a new Autotune.
As for the vibrations, I am 100% convinced that they are caused by poorly balanced propellers. I have never achieved a good vibration level on plastic propellers from T-motor MF series, in my case MF2009. For my first drone, I bought three sets of propellers of different brands: Tarot, T-motor and Sunnysky. Interestingly, vibrations were lowest on Tarot propellers - which were the cheapest. I am a bit concerned about investing in carbon propellers from T-motor because the effect may not be satisfactory.
What propellers do you recommend and what propellers do you fly?
I made a test flight today with new loiter parameters as you recommended. There is a very big improvement, I would even say that the bounce back problem has been eliminated by 90%. The recordings show that Roll is slightly better than Pitch.
I wonder if the improvement of the Loiter is due to one parameter or a group of parameters that we changed?
I think that it would be possible to check the D value as I wrote earlier, perhaps increasing it will be beneficial and/or perform a new autotune and take the average of the new values if they differ significantly.
I’ve had good experiences with the T-Motor CF fixed props, but I cant say either way about the folding props. Those ones you link to look nice, but I haven’t seen them used (that I’m aware of - seen about a million logs now ) They are probably worth a try.
Visually that looks very good.
Notch Filter looks good.
You could safely try increasing D term to
ATC_RAT_PIT_D,0.00425
ATC_RAT_RLL_D,0.0058
Just look for small oscillations or hot motors, but it should not be an issue as this is only a small change.
Depending on what happens with that D term change, you could probably call this completed, or maybe run an Autotune.
The next test will be with a payload I suppose - you may have to decrease the ATC_ACCEL params by a percentage. Dont decrease them by more than about 30%
Usually those LOIT params I gave you make the loiter a bit more snappy, but also less of that double-brake action.
I would say the relaxed PSC params have helped a lot in combination with those Loiter params. Mix in Loiter trying to do moves and braking, and there can be a lot going on.
Thanks for all the advice, they are extremely valuable to me.
Yes, you are right, I will test the load soon. Interestingly, the photos of the drone show that the plate on which the batteries are located is rigidly attached to the frame. Ultimately, it will be placed on six cable shock absorbers, and a gimbal will be attached to this plate. The inertia of heavy batteries will hopefully reduce the vibrations transferred to the gimbal and camera. There was a similar solution in Alta 6, but in my opinion, the stroke of those shock absorbers was too short, which resulted in unstable recordings.
For now, the weather doesn’t look promising because it’s very windy, so I’ll have to wait for the next test flights until the weather calms down a bit.
I recommended the small D term increases to control some very slight attitude control deviations - but it’s not essential, your log showed very good flight.
Today I managed to find a weather window between rain and strong wind, so I am posting flight reports. The weather was windy, there were strong gusts of wind.
In general, I believe that changing the D parameter by even 30% did not affect the improvement of Loiter, I would even say that it was unnoticeable. There is still a Loiter slight bounce back in the Pitch axis, as was the case in previous flights.
First start:
VID00007 - mainly Loiter
ATC_RAT_PIT_D, 0.0045
ATC_RAT_RLL_D, 0.0055
~9:02 - 10:50 - AltHold
~11:50 - hovering test during side wind, during strong gusts the drone can lower its height by about 0.5m
Second/third flight:
VID00008 - Loiter only
ATC_RAT_PIT_D, 0.0050
ATC_RAT_RLL_D, 0.0055
Fourth start:
VID00009 - Loiter only
ATC_RAT_PIT_D, 0.0050
ATC_RAT_RLL_D, 0.0055
PSC_POSXY_P, 1
PSC_VELXY_D, 0.5
PSC_VELXY_I, 1
PSC_VELXY_P, 2
On the last flight I did a test by returning to the original Loiter settings and increasing D (Pitch and Roll) by 30%. I didn’t see the difference between D set by autotrune and D increased by 30%. To match the value described in the instructions, I would have to increase D almost four times.
I will try to perform a new Autotune as soon as possible to compare the values. I ordered new propellers from MAD Components, I hope that thanks to them there will be a revolution with vibrations in my drone, because so far the vibrations are not satisfactory.
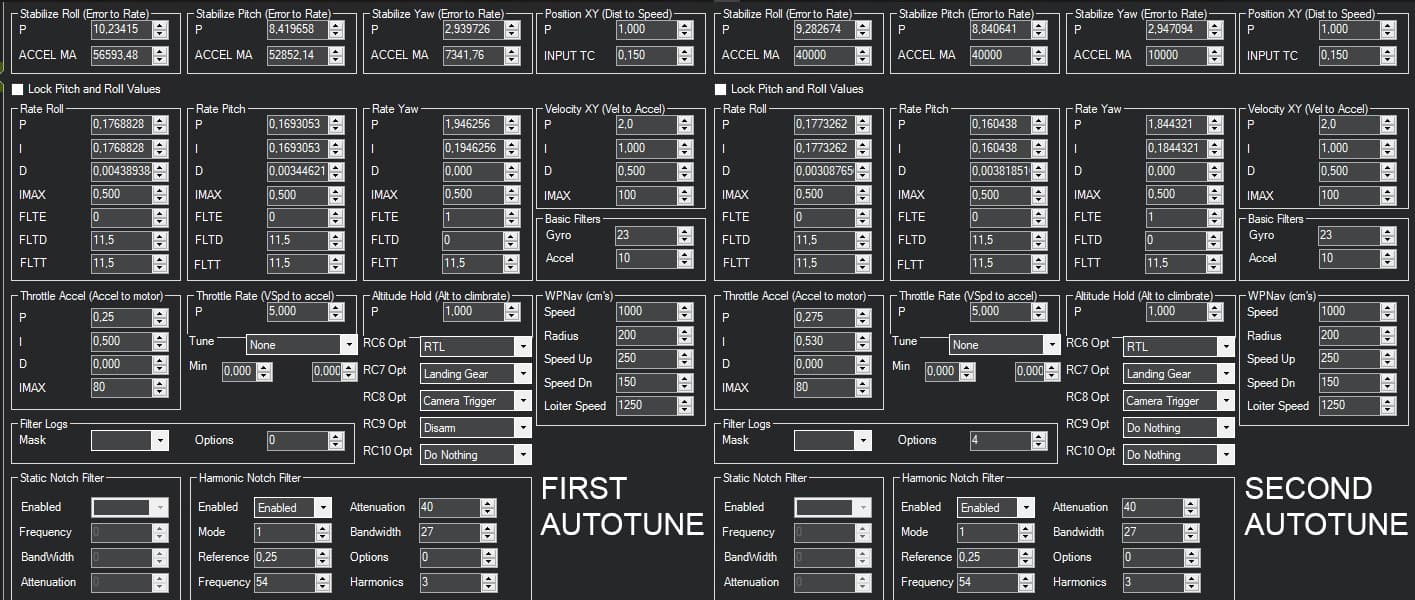
I did another autotune today, starting from the default values. I wanted to check whether the values I would achieve would be similar to those from the first autotune. Here are the results:
In my opinion, the first autotune estimated better values.
I had the impression that the values of the second autotune cause instability during flight.
Both flights were performed in practically zero wind, so the conditions were very good, but only +2 degrees Celsius.
I have included a recording from an FPV camera in the link - a test flight after the second autotune.
Interestingly, after the autotune was completed, the drone was completely unstable, but I had to land in this mode to overwrite the autotune settings. I had the impression that the drone was somehow flying sideways. Miraculously, I managed to land.