Hi,
I’m trying build a rover with brushed motors and L298N as a motor driver. ESC type is set to BrushedWithRelay. The RC transmitter is set to Mode1 (throttle stick is in the middle position for neutral). I’m wondering how to tune things in Mission Planner to reflect the stick middle position to the zero thrust. Currently, the it’s set like this:
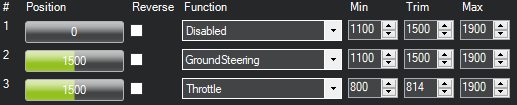
the lowest value is 1048 (stick down), the highest value (stick up) is 1891.
Is it ever possible? Any advice is greatly appreciated.