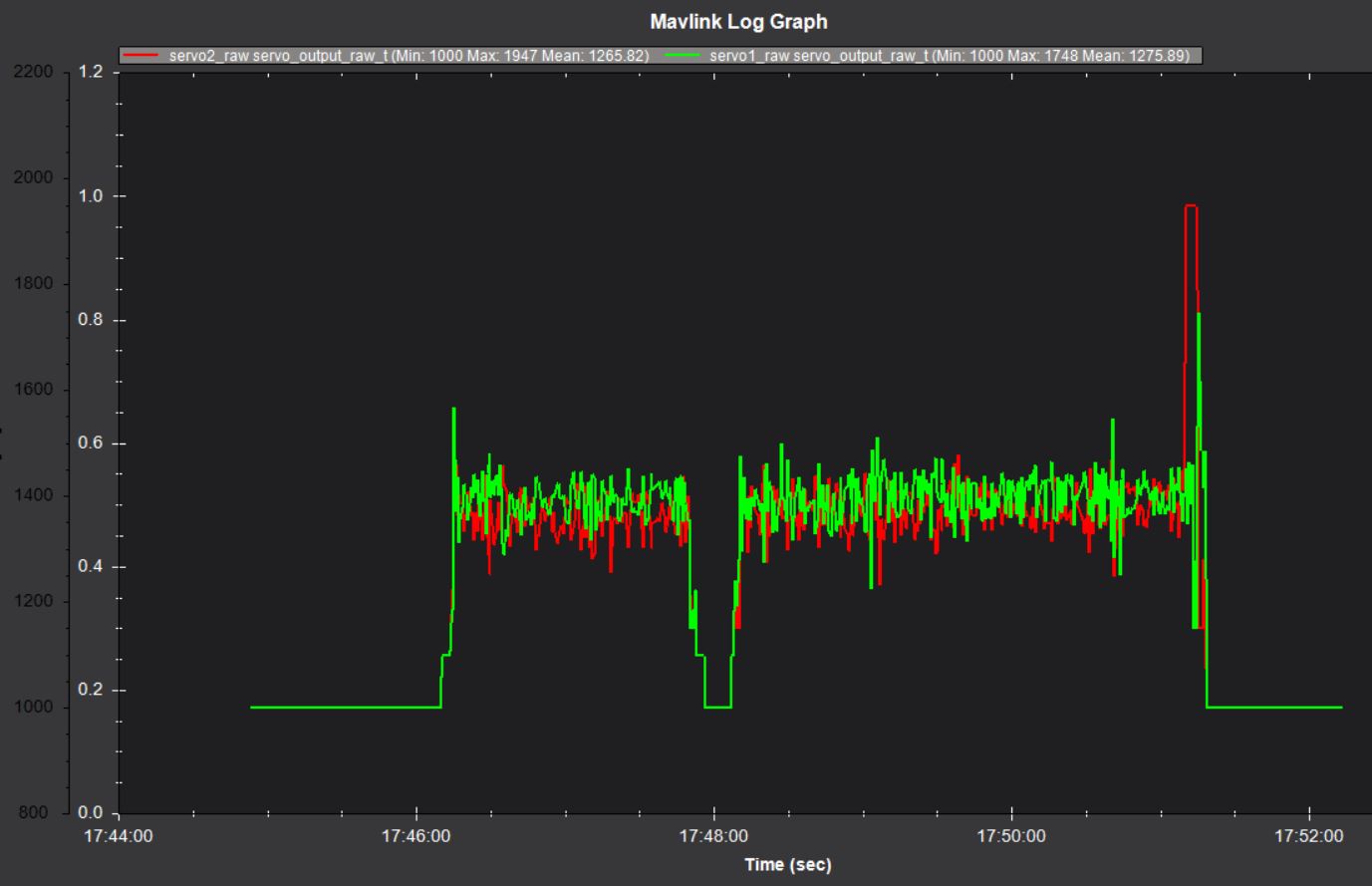
I am new to DIY quads so forgive my ignorance. I have pixhawk 2.4.8 on a X500 carbon fiber frame with four independent 30A Readytosky ESCs, with each one driving a Readytosky 2212 920kv motor. After a lot of trial and error (and several crashes) I was getting pretty good with basic control of the quad. Unfortunately on more than one occasion, my quad seems to lose control and does a death spiral into the ground. On one occasion I heard an audible from mission planner announce “Potential Thrust Loss 2” right before the aircraft became uncontrollable. This has happened on several occasions and does not seem to correspond to any aggressive maneuvers. When I graphed the log of several of the flights when crashes occurred, the same thing appears - the servo2 output saturates immediately prior to the loss of control and subsequent crash (See screenshot below) I have tried making small variations to my PID loops but still the problem persists. I have also attached my log file from one of the flights.
A tlog is not great, can you post a link to a .bin log? You might need to upload it to a filesharing service like dropbox.
PIDs and tuning wont really solve that issue of motor 2 being commanded to maximum (because it stopped producing thrust). That will most likely be an ESC or electrical failure.
The bullet connectors can be an issue, or just the ESC itself…
You could try switching the suspect ESC to another motor and see of the issue stays with the ESC or the motor.
This is the brave persons way to test:
Disconnect your props, flip them over and rotate them one position around the frame.
In this configuration they should push the copter down into the ground - secure the frame anyway!!
KEEP CLEAR
Use MissionPlanner motor test to run each motor for a period of time
lower percentage for longer time, or higher percentage for shorter time.
You would be expecting 6 minutes at 50% as per you tlog graphic.
You wont have to change much wiring around, and certainly not permanently until you identify the problem.
Since you did get flying OK, I would probably get some good name-brand ESCs running BLHELI32 and go from there - unless of course you can find and fix an issue with those readytosky ESCs.
My preference would be a 4-in1 ESC like a holybro 65A Metal, or something like Aikon AK32 55A
The problem with starting out in this hobby is you try to keep costs down and find how everything works and which parts work for you. Unfortunately sometimes we find out the hard way and we have to spend a bit more money on something more likely to be reliable - we’ve all been there and it can take a long time to build up your own inventory of working/not working parts and brands.
This is futile if everything else is at default, which it is. You dropped Rate Pitch/Roll P&I from default (.135) to .118. Doesn’t seem to be much logic in that w/o considering other basic tuning options. Start with the Initial Tuning guide.
Thanks so much for your reply! My guess was the ESC as well. I have been considering transitioning to a 4in1 so this might motivate me in that direction. I will try that test as well and see if I can recreate the problem. Seems logical that it is the ESC due to the problem occurring in the same servo each time. Are the Holybro motors good as well? Might as well change those as well if I am going down that road.
The change in the default rate for the Rate Pitch/Roll P&I was due to some real twitchy motion from those axis in normal flight. Although this did help that problem, I will try the basic tuning options once I replace that ESC in question or trasntion to a 4in1.
There are many parameters to consider to address that. You should start with a basic set of parameters suitable for the prop size and battery power before flying and then tune from there.
My DIY quad woes continue. I have been away from my DIY build for awhile and decided it was time to really dig in and figure out this recurrent problem. As I stated in an earlier post:
Unfortunately on more than one occasion, my quad seems to lose control and does a death spiral into the ground. Right before each crash, mission planner announces “Potential Thrust Loss 2” before the aircraft became uncontrollable. This does not seem to correspond to any aggressive maneuvers and has happened in more than one flight mode.
Based upon input from xfacta I replaces all the servos and the motors, and still the problem persists??? I am not sure where to go from here, so any help would be appreciated.
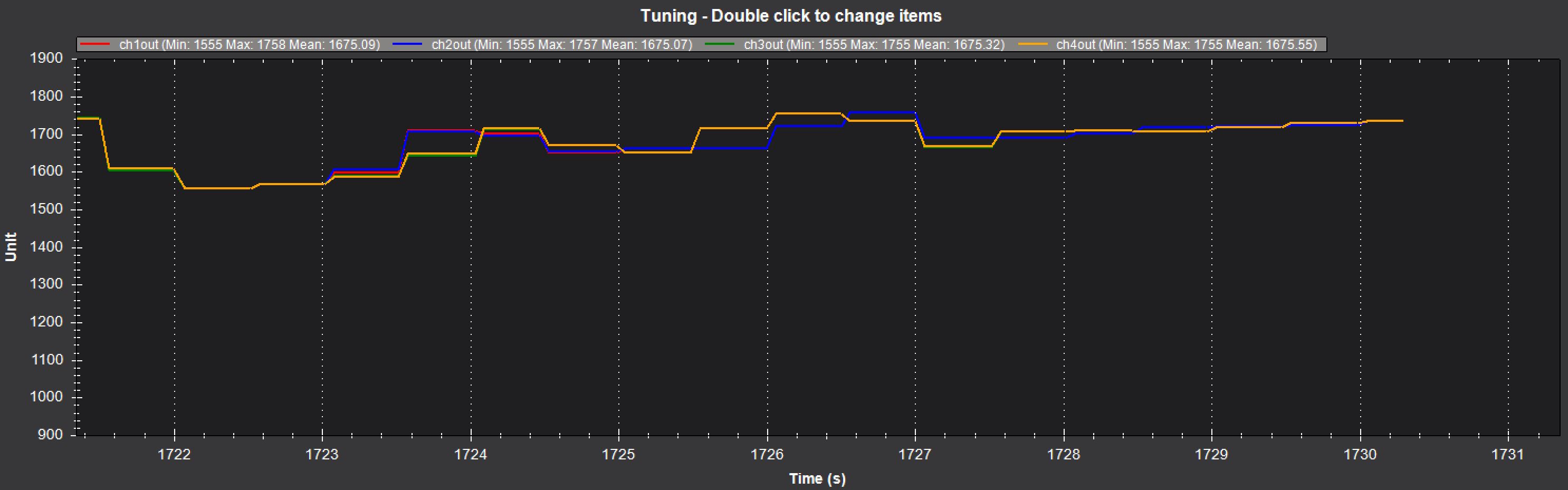
Here we see 2 problems. 1st you have a large mechanical yaw bias as witnessed by the commanded outputs CW to CCW. Then you had thrust loss on Motor 2 and Motor 1 drops to compensate. Classic signiture. So, fix the yaw bias (twisted motor mounts, arms or frame distortion) and check out the connections on Motor 2.
And we can add to this the fact that you have not done the Initial Tuning Setup (in this log), most parameters are at default. There is a screen for that in Mission Planner.
I checked all my connections and motor mount/arm alignments. I also went through the initial tuning setup, and besides inducing some throttle based oscillations, the problem persists. Could this be a connection issue within the Pixhawk itself? This situation seems to be very time specific when it happens, and has occurred with a completely new set of motors and ESCs; could there be a weak connection internal to the FC board that is losing connection due to vibration or heat?
Thanks again for the feedback. Unfortunately I remapped and moved the servo outputs to the next four outputs and got the same response. I was able to locate and solve the altitude oscillations, so I guess I am learning. I assume this proves that the problem is mechanical. Although visually, there seems to be nothing out of alignment, this article states that some frames are so sensitive to motor thrust vectors that you actually have to tilt the motors slightly to assist in yaw movements while not inducing excessive imbalance. Another assumption is that I would have to make minor adjustments to the tilt while monitoring the the pwm outputs until they appear balanced - correct? I also assume that the RCOU data is only in the flash logs, as I could not locate it in the telemtry logs last night after I had put the aircraft in question back on the shelf.
Thanks again for the feedback. Unfortunately I remapped and moved the servo outputs to the next four outputs and got the same response. I was able to locate and solve the altitude oscillations, so I guess I am learning. I assume this proves that the problem is mechanical. Although visually, there seems to be nothing out of alignment, this article states that some frames are so sensitive to motor thrust vectors that you actually have to tilt the motors slightly to assist in yaw movements while not inducing excessive imbalance. Another assumption is that I would have to make minor adjustments to the tilt while monitoring the the pwm outputs until they appear balanced - correct? I also assume that the RCOU data is only in the flash logs, as I could not locate it in the telemtry logs last night after I had put the aircraft in question back on the shelf.