Hello,
I just started with the hobby. But i am facing a problem with servo output in missionplanner.
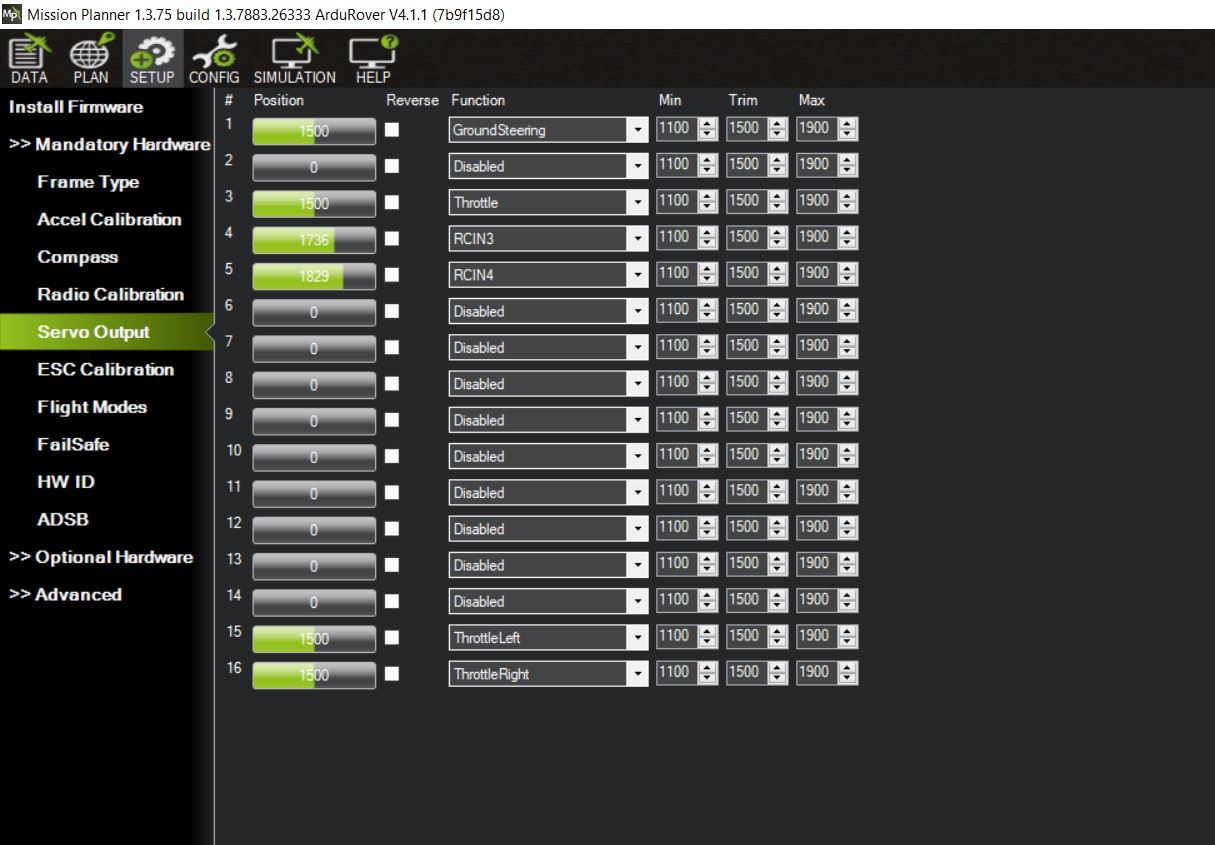
I have a FlSky fs-i6 radio and Pixhawk 2.4.8. In missionplanner at radio calibration all the channels change when I move the sticks on my radio aswell the throttle. But when I go to servo output nothing happens when function throttle is selected. When I select RCin3 the servo output does change. My question is how to get throttle moving asswel because I need this to let my rover drive autonomous.
After this want to make the steering doing skid steering so left and right throttle need to be used. Can somebody someone explain how to program this in missionplanner?
Thank you a lot! It worked for me! Now i have the problem that with skid steering the rightthrottle of the skid steering increases way more when giving throttle then the leftthrottle. Without using the steering stick (right one). Do you know where this is comming from?
It is not uncommon for the left and right motors or servos (not sure what you have) to not match perfectly. You compensate for the difference by adjusting the servo Min, Max and maybe Trim on the Servo Output screen that you show above.
I have noticed that even after this procedure, I still may have a pull to one side, or see that in pivot turns only one wheel will turn rather than one turning forward and the other backward. I have been able to simply tweak the Trim a bit and fix that.
I have been facing the same problem. i can only use RCin but can not use the left and right throttle… is it a problem with arming?
i am also using a flysky FS-i6x and a pixhawk 2.4.8
can someone pleas help?