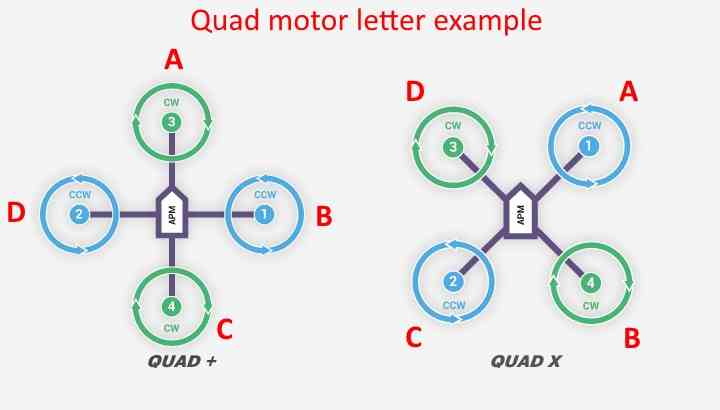
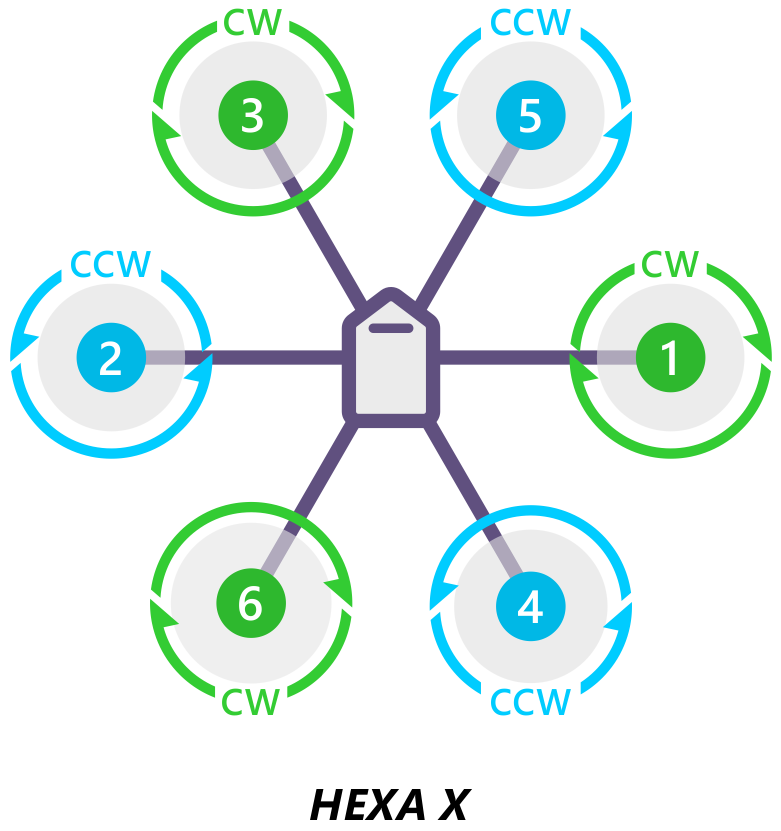
I am using mavproxy to connect to my mRo X2.1 flight controller on a HEXA X frame via a linux machine. From mavproxy, I ran “motortest 1 0 10 1” to see which motor it understands as “motor 1”. When I run this the motor labeled 4 in this diagram turns. Similarly, the following motors turn when I run the following commands:
So I tried setting the inverse in SERVOX_FUNCTION parameters without luck. Eventually i stumbled on the following settings which seem to work, but i have no idea why. The following settings seem to work in that running motortest x spins the motor labeled with that number in the diagram linked to above:
I have checked the wiring multiple times between my flight controller and my motors and they seem to be correct.
I would like to figure out why the above SERVOX_FUNCTION parameters work, but more importantly, Is the motortest experiment I ran the correct way to test this?
Thank you, it turns out this was the confusion. In the mission planner, labels were changed a few years ago from “motor 1” to “motor A” which is more clear. I was using mavproxy though which still uses numbers and even calls the input value motornum:
How wonderful that everything is clear to you here … But one thing is not clear to me, why on all ABSOLUTELY all flight controllers, the motor inputs are numbered 1-4-6, etc.
Why in all firmware BetaFlight-like motors are also in numbers.
And the most interesting thing is why there are still numbers in Ardu’s documentation but in MP while this is such a cool feature as Letters …
And at the same time, the mapping of the motors never matches, on any firmware (I tested 3 different FCs).
I take it this is all done with some kind of supreme intent?
Up questions is rhetorical…
Essentially, for Hexa X, is the QGC piccha correct or not?
{kind=link}