Hi,
I have a problem with lag on servor. The setup is as fallows: Pixhawk is reading rc signals from rc reciver next signals are send to raspberry and it is driving servos by Servo Driver HAT.
possible option is thah there is a delay betwen sending information from pixhawk to raspberry next option is in the servo driver.
What does the rpi do? Why not connect the servos to the flight controller. Tuning may be difficult if you add othet devices into the loop
hi,
The rover is intended to drive from spot to spot and dock automaticly to charge ports, thats were i need the raspperry for docking procedure basing on ultrasonic distance sensors and perhabs some infared guidence.
you are doing it the wrong way around. you should have your motors connected to the pixhawk and the pi giving the pixhawk commands. it can take direct control using mavlink RC override commands.
1 Like
I suppose you have read the Dock Mode documentation and the GSOC thread for Autonomous Docking?
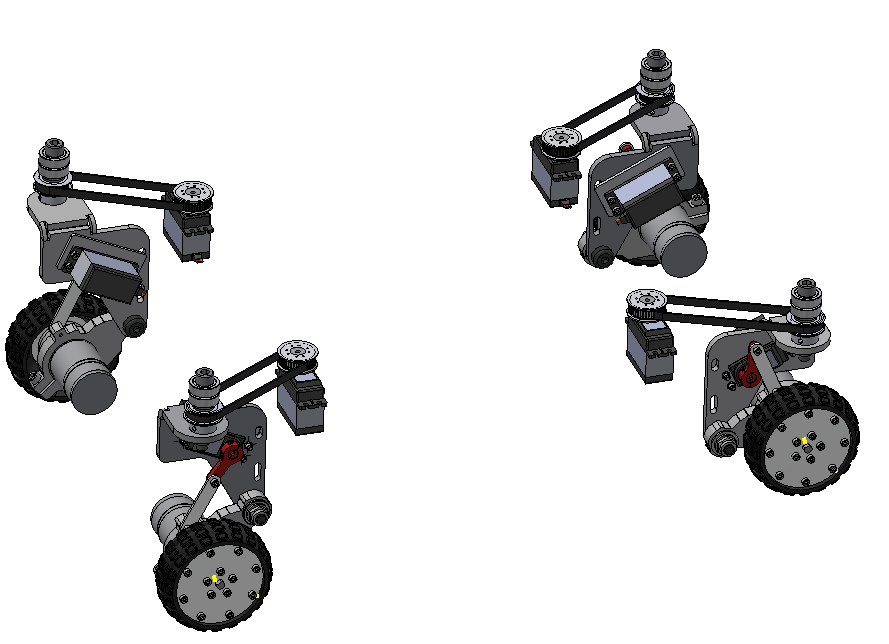
I did not read the dockind mode documentation until now. And i can se that these could be the solution but with my project it could be difficule to aplay. My rover is 4wd and each wheel has independes turn. additional it is intended to have auto leveling so on each wheel there is additional servo that moves wheel up and down.
The ride algorythm is controled by rpi. That kind of control is not supperted.
For now i would like to have no lag rc signal to move on.
ArduPilot isn’t causing the lag. Your choice to post process the signal is almost certainly the cause, and I’m afraid you’re on your own to sort that out.
I took some time but i solve the problem by changing the frequency of sending the rc channels signals in mission planner.