I am new in the topic FlightController, until now I always had receivers and various telemetry sensors installed. I am trying to realize a prototype of a 4 flap glider with electric motor with Arduplane. I have successfully flashed the firmware to the FlightController. The connection with MissionPlanner is ok. Calibrating the flight controller is ok. The calibration of the compass is also ok. The minimum and maximum values of the 4 channels (Roll, Pitch, Yaw, Trottle) are determined and set. Now comes my problem, I can not assign the servo1 to servo7 according to the following pattern:
The servos respond partially, but not with the correct function I have set. What am I doing wrong?
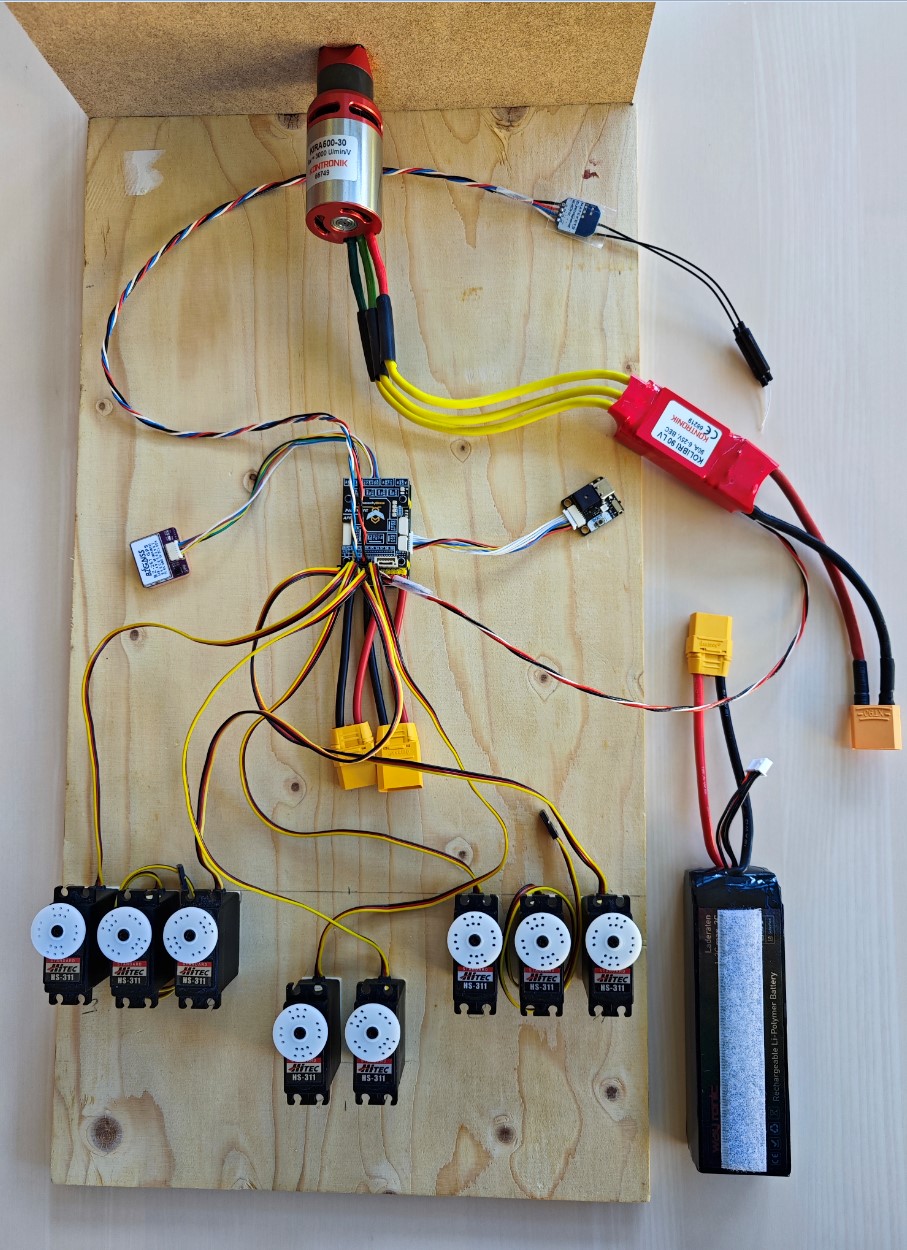
The following are my components:
TX Radiomaster T16S ELRS, with Edge TX V2.90
Windows Software, Mission Planner 1.3.80
Flight Controller SpeedyBee_F405_WING, BEC 5.0V
Firmware Plane/stable-4.4.1/SpeedyBeeF405WING/File “arduplane_with_bl.hex”
RX ExpressLRS 2.4GHz Receiver, R24-D
GPS, BZGNSS, BZ-251-GPS
ESC Kolibri 90 LV, connected to FC with ground and signal
Motor Kontronik Kira 500-30
Can you be more specific about what you mean they respond partially?
Have you armed the board or set BRD_SAFETY_MASK? Arduplane won’t let anything move unless you’ve disabled the BRD_SAFETY_MASK for the various channels, or the plane is armed. The throttle will only work when armed.
Thanks for the quick reply. The motor does start on the left stick and the right stick, but only when they are moved individually to the right. The elevator servo is correct from the channel assignment, but moves only one millimeter.
No I have not disabled the parameter BRD_SAFETY_MASK. Is this parameter global for the FC or is this set for each individual servo.
Good day Allister, attached is the parameter file. As I said I am a beginner in Ardupilot/Arduplane, please do not be alarmed if basic things are missing. I have worked through the online documentation as best I can. Param_20230926.param (18.8 KB)
When you’re testing make sure the plane is in manual mode. Once that’s working then setup FBWA.
I’m curious how you’re powering the board. Servos won’t work from USB alone, they’ll need the battery. Also make sure the power wire from the ESC/BEC is not connected.