Hi my heliquad looses the YAW direction and to me looks like is due to the servo output on channel 1 which looks like capped at the low limits of 1500
Please take a look at the below linked log, am I missing something on the parameter settings or it’s a weird behaviour of the heli-quad firmware?
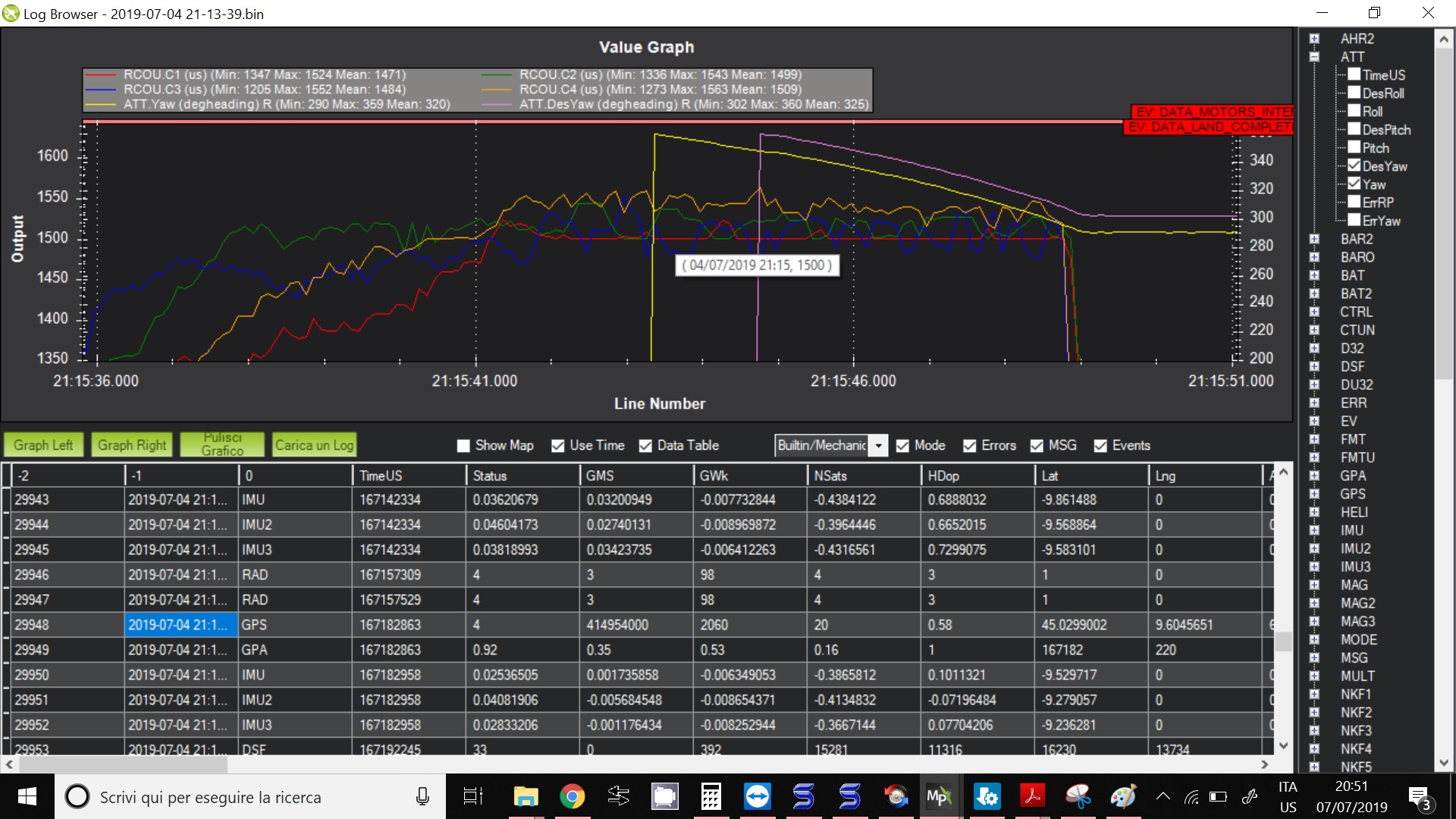
Am I wrong to suppose that the rc1 output had to try to go lower in order to compensate for the uncommanded CCW YAW ? From the attached screenshot looks like in this condition it was a sort of lower output limit
Below 1500 your prop should go negative pitch and generate a downward force. At least that’s what a heli collective does.
At 1500 you get zero lift from that engine but the torque still affects YAW, proportional to the spinning speed.
I totally agree with you that’s what I thought when I first saw the 1500 value, but I think that not every heliquad users are adopting rotors like the one of the WLtoys with same amount of negative and positive pitch where 1500 would match the 0 angle, In my setup my rotors have a range of -2 up to +11, at 1500 i am still outputing a +4 degree of pitch, Also I thought that H_COL_MID had to set the 0 lift value ( in my case it is set at 1270) …Of course I thinked about adjusting the servo links in order to match 1500 at 0 degree , but would be nice to have the possibility to configure Arducopter to better fit the hardware of the heliquad