I’ve posted recently and received help on routing telemetry for a sensor connected to a raspberry pi connected to a flight controller using mavproxy in this forum, for which I am grateful. ![]()
My new problem now is seeing the data that is being forwarded. Using mavproxy to create multiple masters and forwarding outputs to my GCS/Terminal, I’ve come to the conclusion that the data is not being saved because the UDP receiver(pymavlink) does not understand the message.
My new approach to this problem is to create a custom MAVLink message following the directions on the ardupilot site. During this process, I was curious about how the data coming from the sensor needs to be formatted for transmission to the ardupilot. Currently, the weather sensor I am using sends the data at 1Hz in ASCII format as shown below:
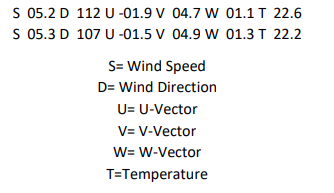
There are actually a lot more samples that the sensor takes. This is a picture of the actual output without removing any tags in a single sample:

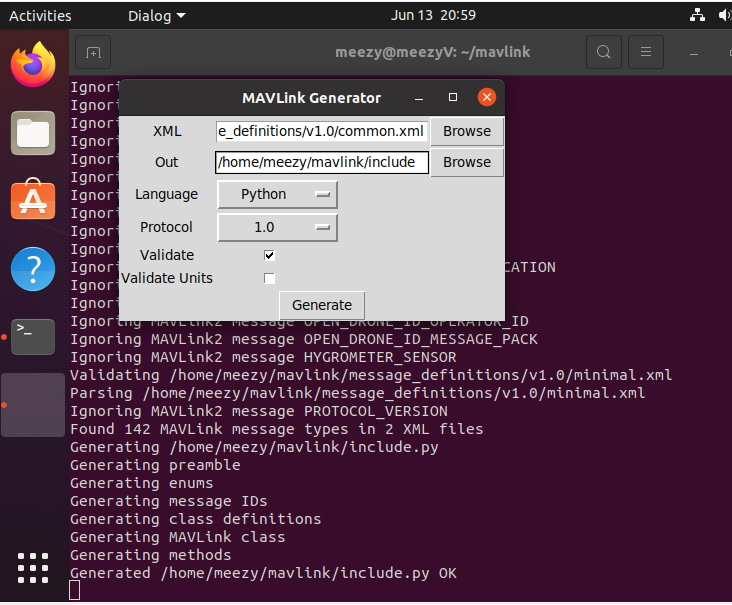
So far, I’ve used mavgen to generate the headers and etc
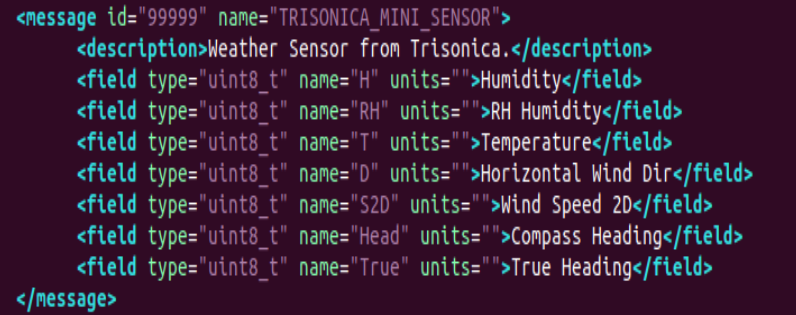
Now I’m adding the message in common.py
Then I need to complete step 4 which I’m still trying to figure out.
My questions are:
- Will I need to create a background process to convert the current format to XML in order for the data to be transmitted properly through the Rpi → Ardupilot → GCS?
- If seen something about sending unknown messages, can I use that to bypass having to convert from ASCII to XML live?
- Does anyone have any tips for me for this process?