I am trying to develop a self driving grass trimmer running autonomously on a solar field. The goal is to trim the grass/weeds underneath the solar panels. The panels are placed close to the ground. Between each row of solar panels there is a space of 30 centimeter. The lowest point from a solar panel to the ground is around 25 centimeter (around 9.8 inch). That means I don’t have much height to work with. The rows have lengths for about 400 meter. The cutting mechanism has to be in front of the rover. The weed is dense, so it’s not possible to drive over it.
For the cutting mechanism I will just start with servo’s from an old drone. I think i’ll manage to drive the servo’s with a companion computer. Goal number one is to drive the rover beneath the solar panels, after that I’ll start tinkering with the cutting mechanism.
I’ve read the documentation on the website about the rover and I still have a few questions.
What is a good vehicle to start with? In the documentation there a few recommendations, but most of the links are dead or out of production. What is a good frame to start with? On Aliexpress I maybe found a few options: for example this one.:
It’s really fast, but I don’t need speed. It can take all the time it needs as long as it cuts the weed. It’s also 1/12 so maybe it’s to small? Also I would rather have more width so it’s more stable. I also need space for the batteries.
For getting from point A to point B I need GPS RTK. Is it even possible to get reception beneath the solar panels? I think it will be hard. Maybe it doesn’t really matter though. If it gets reception on starting point A, it can go to point B using the compass. The lines are straight. What do you guys think about this? The width of the panels are around 120 centimeter. So I need some sort of accuracy.
A public Ntrip station is situated within a distance of 5km. Could I just just that instead of a RTK ground station?
Is this a good kit to start with? I could always upgrade afterwards if it’s not good enough. (the GPS in that kit does not support RTK, so I would need another module for that). Pixhawk PX4 Pix 2.4.8
Do you guys have other suggestions that I am missing?
For sure you should test RTK GPS in your environment, under those panels, pretty early in your project. For what it’s worth my RTK GPS works better than I thought it would outdoors under and around trees but of course it doesn’t work indoors. I suspect those panels will block enough of the GPS signal to prevent a GPS receiver from maintaining good accuracy. But you should test. Magnetic compass might also be confused by those panels’ EMF. My sense (and I’ve worked with ardurover a lot) is that driving 400 meters just using compass will be quite difficult. What about an optical solution, i.e. a camera that looks up and sees the gap between the panels, and then navigate (at least while traversing down each row of panels) using the camera?
I have the same concerns, and you will want to thoroughly test RTK GPS and magnetometer performance in the given environment. Additionally, I’m skeptical that you’ll get any effective weed/grass trimming done with the vehicles you linked. They appear very light and nimble, which will not provide much stability or inertia for a trimmer.
Agree with Yuri. The 10th scale 4wd crawler rover I have wouldn’t push any kind of trimmer and it’s a lot more robust than those you linked to. As far as an off-the-shelf vehicle platform there are not many. I’m not sure if even a 6x6 AION Robotics vehicle would do it although that is a good form factor for what you are considering. Perhaps if you share what the Trimmer tool will look like?
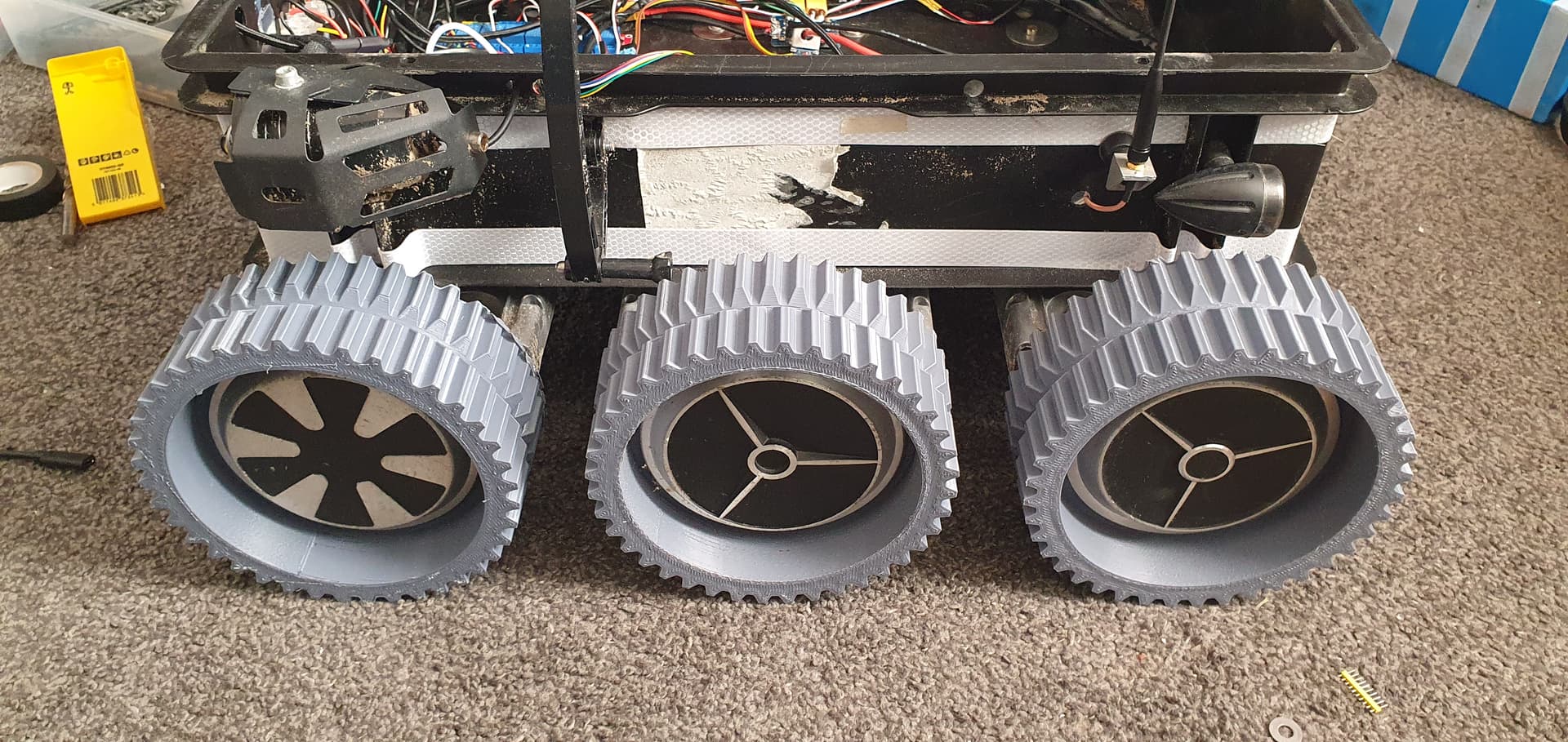
you should look at the hoverboards, they are cheap and have lots of torque. tyres can be 3d printed with more tread but the stock wheels are pretty good on grass.
Hi, yes I’m also want to add an camera with object detection. But I would rather rely on GPS for navigating, because it’s more reliable. I think in places where the weed is dense, it would block the sight of the camera. Also the lense could get blurred. But I think it will be a good idea to detect the open space between the panels.
Maybe I could make it stop between the panels using something like a photoresistor, so I can reacquire the GPS lock.
I could just order a RTK GPS module and try it out.
Yes I agree they may be to nimble. I visited a local RC shop yesterday and they had a 1/10 model with a big plate on top for adding electronics. It was a a low speed high torque vehicle.
The first prototype does not have to be perfect. I can also change the vehicle or make modifications afterwards. I just want to get started and learn along the way.
I am inspired by this design. No idea if it will work, but it’s a start.
Really cool I haven’t seen these designs. It looks harder to make though. Maybe it’s an option to just make a frame like that with 4 brushless motors.
My hoverboard rover is just hoverboards bolted to a crate and flashed to take RC input. You can get the boards woth dead batteries for £20 all they only need is 2 capacitors and firmware flashed and they can be used for RC.