I have recently completed my 7-inch copter and took it for a test flight in the fields. I successfully managed to enable the AltHold and PosHold modes, though the copter did exhibit minor oscillations. Despite this, I decided to experiment with the autotune mode. During this process, I received the following message:
Autotune: Failing to level, please tune manually.
After returning to the bench, I halved the P/I/D values for roll and pitch, which allowed my copter to hover indoors with significantly reduced oscillations.
I would greatly appreciate it if you could take a look at my DataFlash logs. Please let me know if it’s tuned enough to retry autotune, or if it requires further adjustments. Thank you! after-pid-halved.bin.zip (944.9 KB)
Is there foam covering the barometer?
Drop the Rate Pitch/Roll P&I to ~.07 and then set these:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.16
PSC_ACCZ_P,0.08
These last 2 will probably have to change after you get stable outputs.
Perform a simple hover flight in AltHold for a minute or so to collect data to configure the notch filter.
Hello, Dave, I greatly appreciate your prompt assistance.
Is there foam covering the barometer?
The barometer isn’t covered by any foam. Although I’ve noticed the copter maintains altitude well, I’m curious if this could be the root cause of the persistent oscillations I’ve been experiencing. Would you say it’s a potential issue?
I’ve successfully executed the ESC Calibration and completed the Motor Range Setup. My current values are as follows:
MOT_SPIN_ARM: 0.04
MOT_SPIN_MIN: 0.07
These values are notably lower compared to what they were previously.
In light of your recommendations, I attempted to adjust certain parameters, but encountered some difficulty. INS_LOG_BAT_OPT - The documentation indicates that it only accepts 0,1,2 bit mask values. PSC_ACCZ_P - The specified range in the manual for this value is between 0.200 and 1.500. Should I enforce writing these values or would you recommend a review of your initial suggestions?
And one last question, is it possible to use stabilize mode during hovering to gather data? I’m not sure if I’ll be able to get into the field today, but I can hover indoors. I’m hesitant to do it in AltHold mode.
Enter 4 as the Option, it’s a bitmask and ignore the range warnings and enter what I suggested. You can try to hover in Stabilize but you will have to do an AltHold hover at some point
I followed your recommendations and took the copter out to the fields. I made sure to set the parameters as you’d previously suggested. I’m happy to report that the copter performed quite well under Stabilize, PosHold, and AltHold modes.
This time around, the motors maintained a cooler temperature compared to the last time when they were running very hot. Another significant improvement was that I managed to successfully complete the autotune process for the Pitch and Roll axes. Here are the values that the AutoTune calculated:
Following the saving of these parameters, I found that the copter flew quite stably in Acro mode. However, it did exhibit some shaking when the altitude decrease was being slowed down.
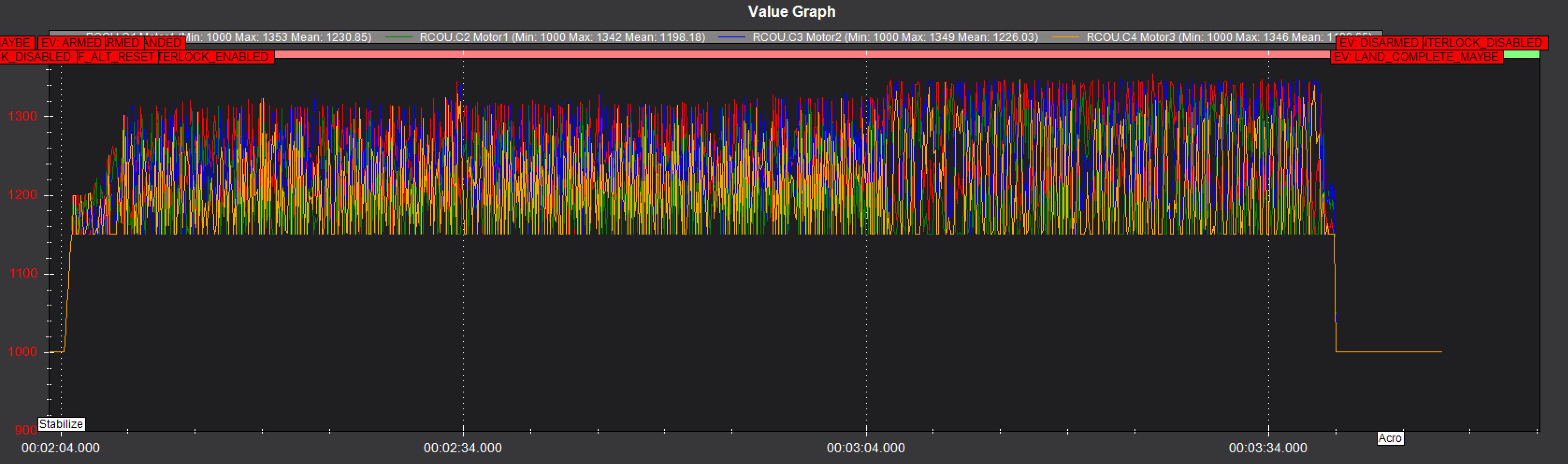
Unfortunately, I was not able to obtain logs during the autotune process. However, I do have logs from an indoor hovering session in Stabilize mode, which took place after all the tuning was completed. log_10_UnknownDate.bin.zip (616.4 KB)
I would really appreciate it if you could review these and provide some guidance on how to proceed next. Thanks in advance for your help!
Running Auto Tune before configuring the Notch filter was pre-mature. You will have to configure it and run it again. Set these:
INS_HNTCH_ENABLE,1 (then refresh parameters)
INS_HNTCH_ATT,40
INS_HNTCH_BW,50
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_FREQ,100
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.08
And then do another hover test in AltHold (not Stabilize) and this needs to be reviewed to determine if the filter is effective before advancing.