Probably because you don’t have an RC function assigned as 300 (scripting).
Follow the instructions carefully.
Probably because you don’t have an RC function assigned as 300 (scripting).
Follow the instructions carefully.
Honestly I dont understand the ardu documentation. Shall I assigned to some RC channel / trasmitter stick value RCx_OPTION,300 and whith movement of that stick I start script processing?
This is not the ArduPilot docu, it’s from the first post in this topic.
Yes, I don’t have this RC function assigned. If I don’t want to use switch (I want use GSC) I don’t need “advance-wp.lua” script, I am right?
I am not sure if I understand correctly to all of the step. I understand that I must enable scripting and upload scripts – I done it. I see all “MAGH_” parameters in Full param list. Then I create on Flight Plan Screen flight plan according to your instruction.
After this step I am not sure what to do. You wrote “Upon execution of the mission, several messages will be displayed via telemetry”. By “upon execution” do you mean after the flight plan is written to the copter (= Flight plan is available on Flight Data Screen)?
Then you wrote “Download the mission to confirm obstacle clearance before proceeding, and then use the GCS to set the indicated waypoint to continue (or use the additional helper script below to use an RC switch for advancing the waypoint).” In this step am I execute “Mission_Start => Do action” command? I understand that after takeoff quad is waiting for either GSC command or for switch input to proceed the first “figure-8” waypoint? I am right?
I am sorry for these stupid questions, but this is my first Ardu quad. Thanks for help.
Just fly some figure 8s in alt hold or loiter mode and use the new online tool to analyze the log.
Come back to these advanced features when you are a little more comfortable with the system.
I just wanted to know if I correctly understand your step-by-step, nothing more ![]()
My point is that it isn’t worth agonizing for days over a feature that isn’t likely to help all that much…and I don’t want to see you crash your hard earned new copter by trying something more advanced than you are prepared for.
I explained things pretty explicitly, and your lack of ability to follow those instructions likely means you aren’t quite ready to use these features.
A couple figure 8’s with some throttle changes…
Then use the tool available.
If you have an interest in Lua Scripts in general watch Yuri’s YouTube video. There is no compelling reason to use it for this purpose at this point in your tuning process.
My initial reasoning for making this script was to potentially provide consistent, useful results. But it’s become apparent that you really don’t need to go to this length to tune one Copter.
Now, if you had a fleet to calibrate, I think this script might become quite useful to efficiently tune multiples on the same flight path with reduced operator workload.
On the other hand if you had a fleet to calibrate all at the same location, you could run the sript on one drone, then download the generated mission and reuse just the mission to calibrate the rest. That would even enable F4 autopilots to fly the same calibration path (as long as one F7/H7 drone runs the script to generate the mission).
That’s exactly what I was suggesting.
Oh well, thought you meant to use the script on every drone ![]()
I successfuly execute the script. You are right that step-by-step was easy to follow, I just dont understand arducopter basics.
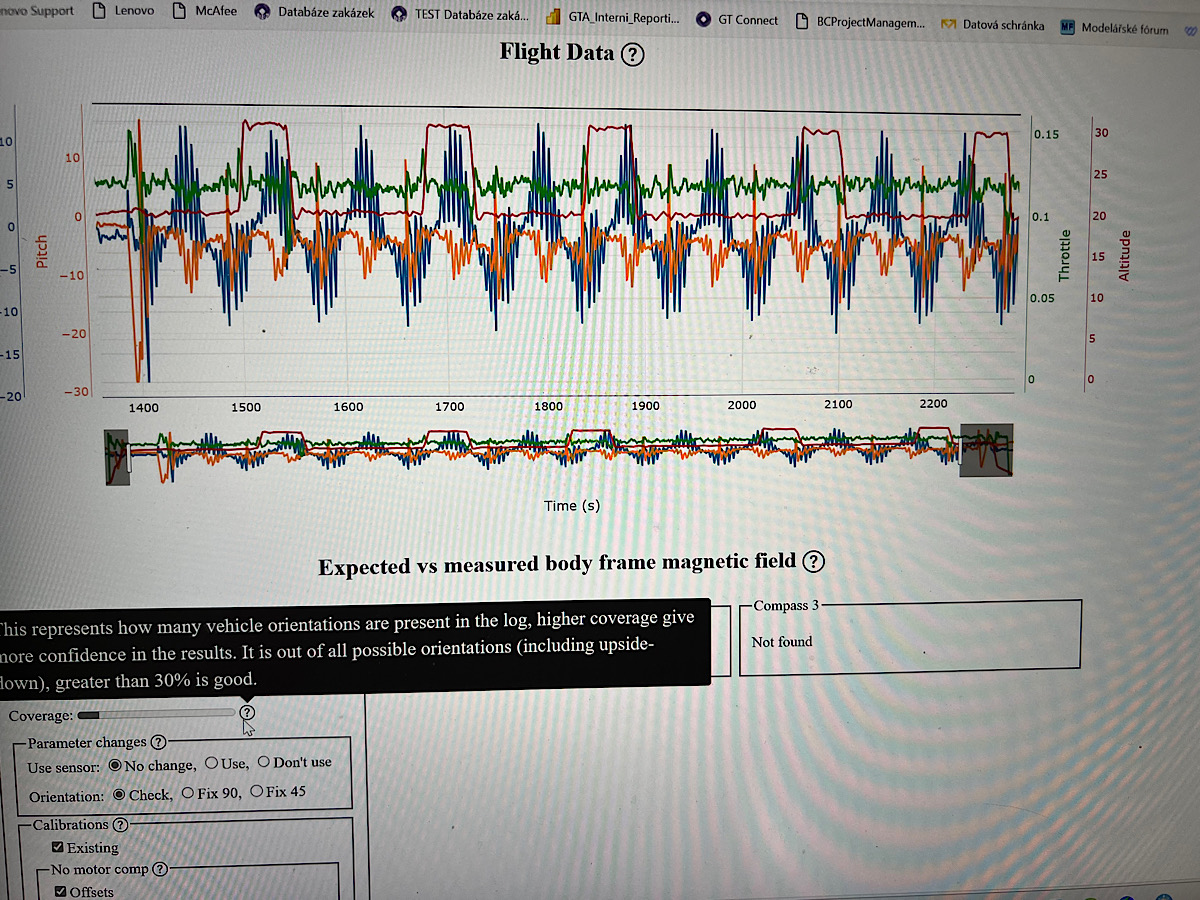
One last question in the web magfit tool is “coverage indicator”. Coverage indicator shows low values. My question is how important is bigger coverage regarding to calibration results?
If I am using the UM982 for the ( GPS for Yaw (aka Moving Baseline) will I need to augment this process at all?
Essentially I have added the um982 and don’t want to screw up how well I currently have it flying by configing it.
MAGFIT only affects compasses. If you’re not using one, you don’t need to do any of this.
If you are using a compass fallback, then calibrate and accomplish MAGFIT.
Has nothing to do with GNSS.
is it possible to execute mission/prepare flight plan on the desk without GPS and battery attached?
hi @Yuri_Rage
iu have donen a magfit on my drone post related to it is ehre - Tuning EFT Z50 Drone, x13 hobbywing motor (issues)
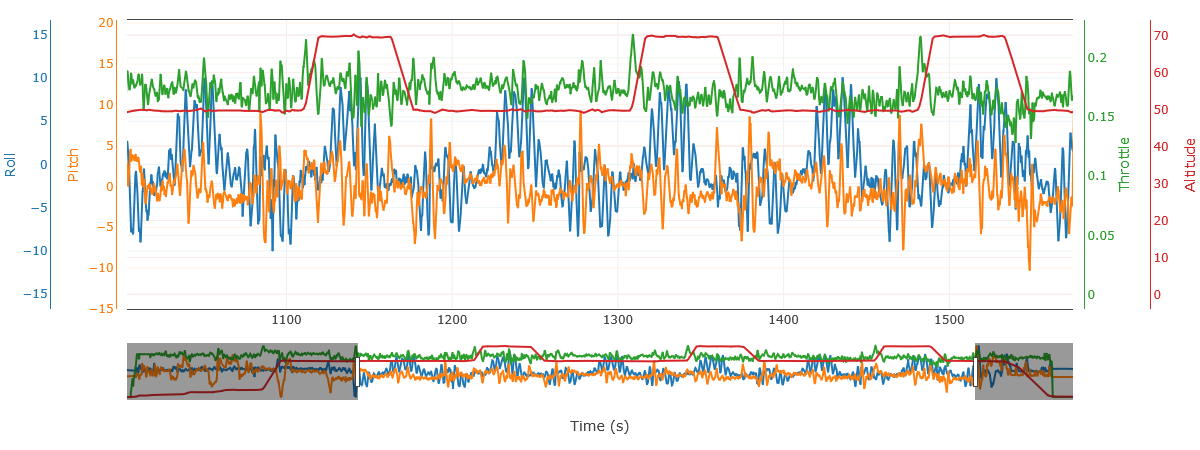
sharing the magfit flight data and pic here. do you feel it was a good magfit flight.
the flight bin file is here in this drive named as magfit flight. x13 hobbywing & eft z50 frame & Ardupilot Methodic Configurator - Google Drive
and the prams i got from that are _
COMPASS_DIA_X,1
COMPASS_DIA_Y,1
COMPASS_DIA_Z,1
COMPASS_DIA2_X,1
COMPASS_DIA2_Y,1
COMPASS_DIA2_Z,1
COMPASS_DIA3_X,1
COMPASS_DIA3_Y,1
COMPASS_DIA3_Z,1
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_MOTCT,0
COMPASS_ODI_X,0
COMPASS_ODI_Y,0
COMPASS_ODI_Z,0
COMPASS_ODI2_X,0
COMPASS_ODI2_Y,0
COMPASS_ODI2_Z,0
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_OFS_X,-19.97556 # as per webtool
COMPASS_OFS_Y,-72.33902
COMPASS_OFS_Z,32.342266
COMPASS_OFS2_X,-95.48271
COMPASS_OFS2_Y,87.54403
COMPASS_OFS2_Z,45.680996
COMPASS_OFS3_X,-228.35738
COMPASS_OFS3_Y,116.251724
COMPASS_OFS3_Z,-282.025
COMPASS_ORIENT,0
COMPASS_ORIENT2,0
COMPASS_ORIENT3,0
COMPASS_SCALE,1
COMPASS_SCALE2,1
COMPASS_SCALE3,1