If you have a Pixhawk 2.1 Delivered in 2016, please follow these instructions before further flight.
**
This does NOT affect the Alpha boards, it does not affect 2.0 boards (SOLO) and does not affect made in 2017 boards
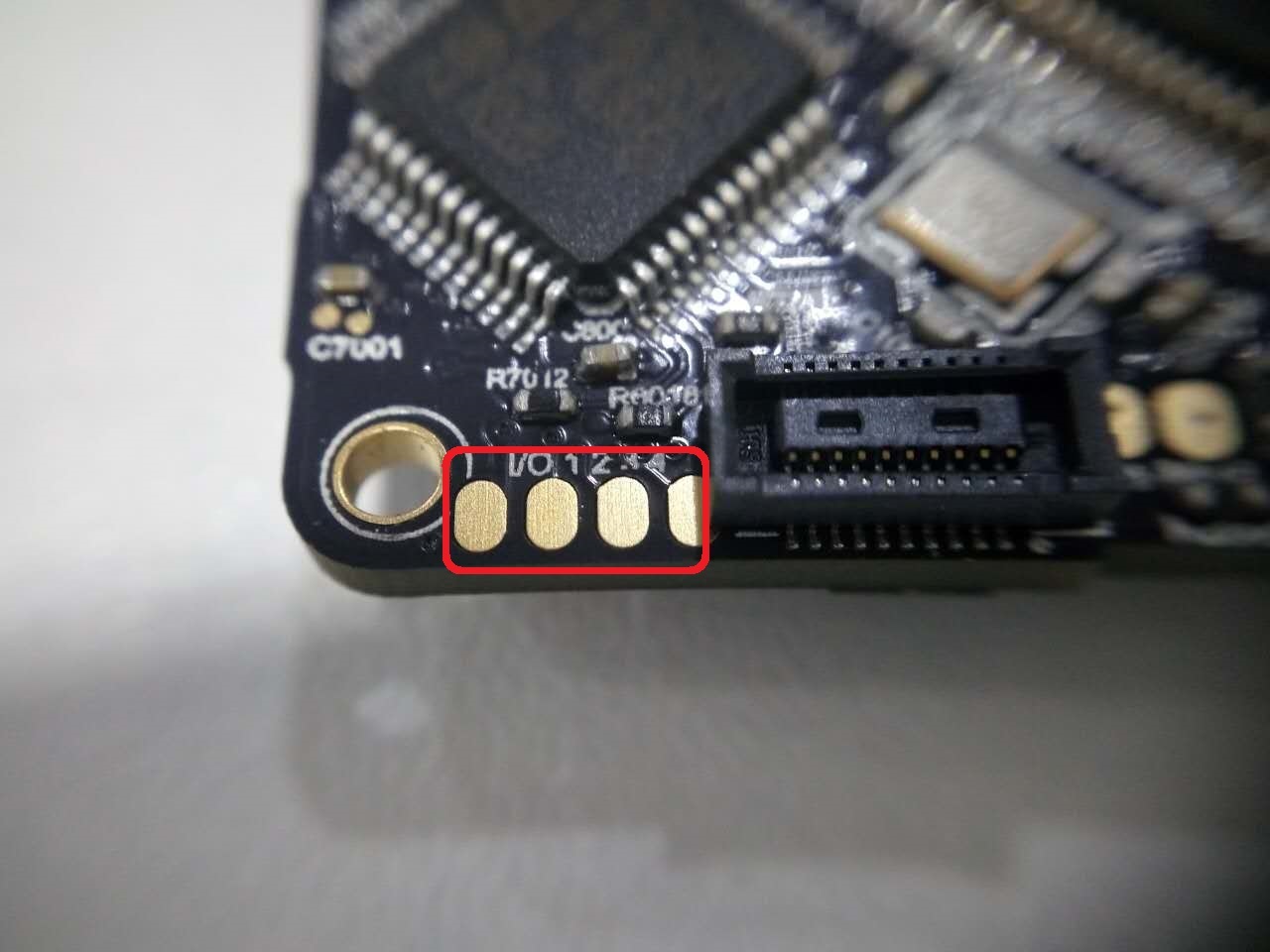
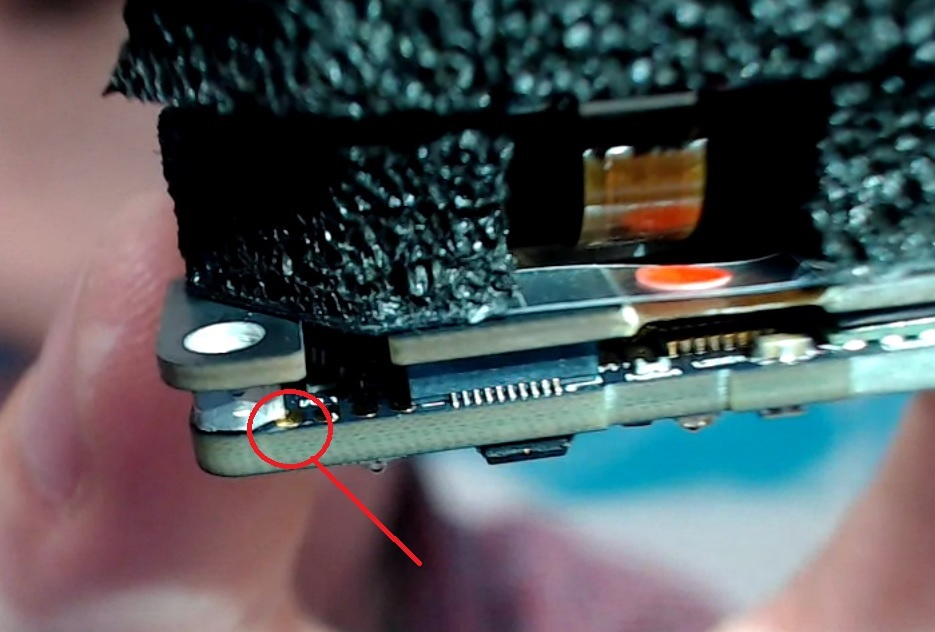
I/O channel 1 can be affected by over torquing the mounting screws holding the cube to the carrier board.
There is no preflight check that can be done to stop the aircraft arming if this is the case.
There are two solutions to this issue.
As short term, software fix to keep you in the air…
Please move channel one to channel 5 by setting the following parameters.
Firmware 3.4 set RC5_FUNCTION=33
Firmware 3.5 set SERVO5_FUNCTION=33
As a third thing, I am working with Michael Oborne to make a service bulletin section in mission planner. this will identify your board, and list any known issues, and give you any information you need to maintain safe flight.
Please keep mission planner up to date to take advantage of this service.
the modification is a user mod, and instructions will be posted for these.
We specifically released this batch as a Beta batch.
We have highlighted the following issues…
Case slightly loose… (cosmetic, no flight risk)
Cable to Buzzer too short
Zener diode on bower brick fitted with incorrect value, no effect on flight.
One unit had an incorrectly mounted IMU. Prearm checks caught this, no risk to flight
This issue, flight risk, immediately proven, verified, and a notification issued, with support from the Ardupilot Development team to find a software workaround while we get the repair kit to people.
I will continue to highlight my errors. And I thank those reporting the issues, so we can find and correct them. I hope we have found them all, but we will keep looking, and keep being honest.
I get my Pixhawk 2 Suite on end of November (first batch) should I worry
or not ? I do not understand this information. It refers to beta cube
or all copies produced in 2016 ???
If I received the cube in 2016, it’s part of the “beta batch”?
I keep getting compass and gyro errors randomly… I can reboot the board and they’re gone, reboot again and they’re back.
and is it necessary to set servo1_function to 0?
(I just got the service bulletin when I updated MP)
Moved esc1 to esc7… weird stuff… I’m assuming that means my cube is f’ed.
Bad gyro health a million times…
I ran the calibrate level, and it stopped for now.
The mag field value dropped from 500 to 460
I’ve spent almost 2 months trying to figure out what I’m doing wrong… if this turns out to be the problem… ugh.
well, stupid me… I just went to fly the drone, and it took off and went straight for a tree 30 yards away… the entire copter virtually demolished… lying upside down on the ground with one prop spinning at full throttle.


 Kapton tape will work
Kapton tape will work