I’m using hobbywing skywalker esc’s for my hexacopter.But my deadzones of the esc’s are different.Three esc’s have 5%deazone while other three having 7%.Is it normal and how could I setup motor range parameters.My drone also tries to flip at takeoff
how do I solve this
Almost always by getting the motor order and direction correct.
The directions are corrected
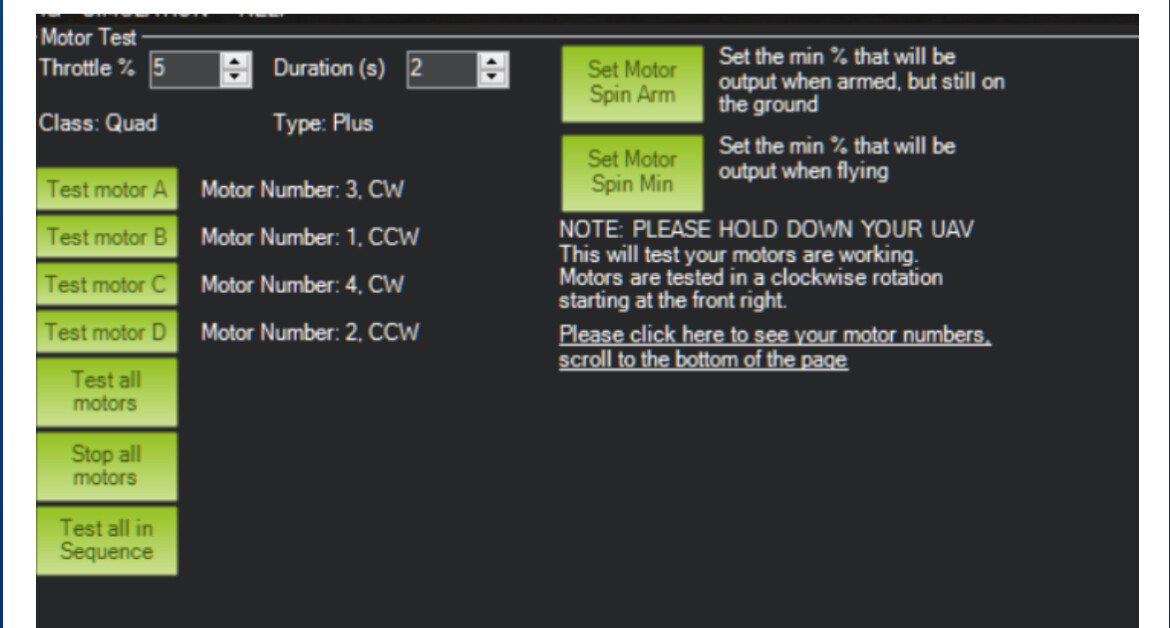
Is the motor order correct? You can check the motor order with mission planner like shown here.
Keep in mind the difference between the numerical (1-6) order and the alphanumerical (A-F) order.
Regarding the flipping at takeoff:
Is the FC pointing forward? If not, is the FC orientation set correctly in the AHRS_ORIENTATION parameter?