I think a possible fix is to check whether the chosen heading is inside the no-go zone and if so, adjust it to the closest heading that is outside the no-go zone. You probably want to do this continuously so that it will correct the course if the wind shifts.
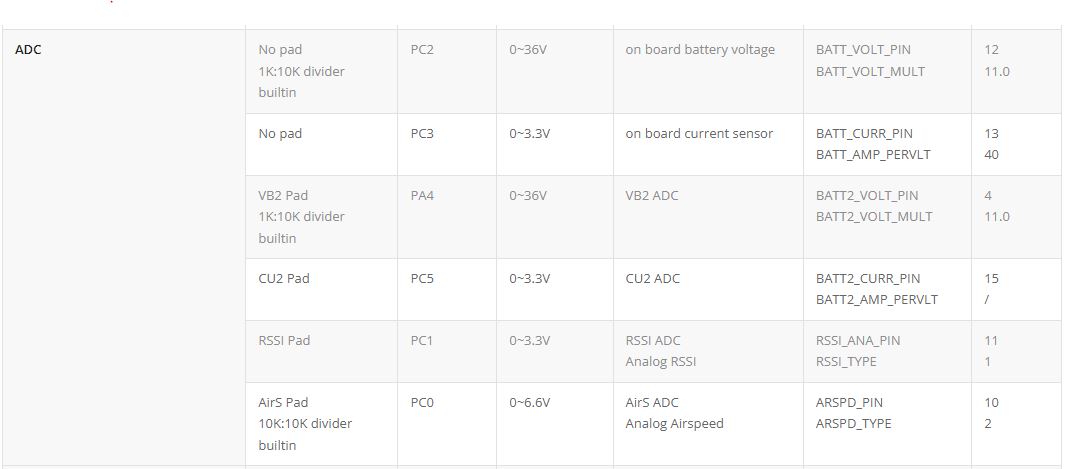
I am attempting to set up my first ardurover sailboat project. I am using a F765 wing FC, and a wind vane based on the Bourns 360 potentiometer, I have the modern devices Rev P Wind Speed sensor. I have the wind vane working fine, connected to the AirSPAD and Pin 10 selected in parameter WNDV_DIR_PIN I see headings in Mission planner.
I am having less luck with speed and temp from the Rev P. I am unable to find a way of getting windspeed readings from the modern devices. I have OUT and TMP pins connected to two 3.3V ADC pins 15 and 4 on the F765 for my WNDV_SPEED_PIN and WNDV_TEMP_PIN. But don’t seem to get anything on windspeed values. Not sure where to look for Temp values as these do seem to be a tick box option.
I see values when measuring with a volt meter on the temp and windspeed outputs, both varying with simulated wind and temp.
During my PhD I implemented some code in Ardurover for sailboats, mainly by adding some sail control techniques, and another tacking strategy, and I think they might be useful for the community. The problem is that I ended up changing many parts of the code, added new parameters (to switch between strategies), and so on. And now the code is about 2 years behind the main branch. Any tips on what should I do to adjust the code, and do a pull-request to the main branch?
Probably the best way to contribute is pull out small features in to individual pull requests. Lots of changes in the main code that will mean a big rebase of the whole lot will probably be quite messy.
After reading the whole thread I would like to test but I don’t know which controller to take. https://ardupilot.org/rover/docs/common-autopilots.html
gives many possibilities of choice but for a newbie like me it’s too complicated.
Which is the cheapest of the possible choices?
The prospect of probably losing the boat tells me that this is the right path
is there a good solution with a reduction at the moment or a bad one because the software will soon no longer (or even already) allow you to load openpilot sailing ?
I’m using matek f405-wing, and P3022 sensor as windvane.
I want to connect the sensor’s analog outpin to RSSI, which is the correct value of WNDVN_DIR_PIN?