Is there a way of setting the Sailboat motoring 3 position switch function from lua, I want to control the switch based on main battery voltage, so above 12v it will just use the motor, 10.5-12v will sail with motor assist then it will only sail once its under 10.5v.
Yes, probably only on 4.2.dev tho.
rc:run_aux_function(74, 0) -- never use motor
rc:run_aux_function(74, 2) -- always use motor
1 Like
Yes I can use motor easily with the aux functions, but those are binary, that would remove the option for motor assist, it’s the most important one out of them all, so I need all 3 modes.
You can do assist with:
rc:run_aux_function(74, 1) -- assist
1 Like
Sorry I misunderstood you, ok that’s exactly what I’m looking for thank you.
I tried using the button test script to test it and it doesnt seem to do anything, im not getting any errors but im not getting the message that its changed sailing modes either
.
batterysail.lua (802 Bytes)
After a lot of testing, I found that this problem does not occur when I retry with the old parameters (00000026.BIN). Then I tried to run the same FC with the same parameter that had the problem and the elevator did not work properly in ACRO mode (00000026.BIN). Originally this problem occurred when I refurbished a new identical FC and wrote the old parameters. Since the two parameters are the same, I am now suspecting a faulty FC or a failed firmware installation.
1 Like
I have been doing some testing with the motorsailing setup, and from my testing all the sailing switch does is disable forward propulsion, transverse omni thrusters and left right motor yaw control stays online they just cant propel the boat forwards or backwards. Ideally, there should be a mask to select what motor gets disabled rather than just inhibiting forward thrust.
1 Like
Yep, we should fix that, your breaking new ground with a omni sailboat.
2 Likes
I’m about to start a sailboat build and had a quick question about wing sail elevator hardware:
Does the wing sail need to be able to rotate completely freely with a slip ring to pass servo signal through for unlimited rotations? Or can it be restricted to 180 degrees of rotation?
My concern was that it might get stuck to one side when turning downwind. I don’t have any experience with this so I’m not sure if this is a valid concern.
Thanks!
Restricting the rotation should be fine, the limitation will be the distance you have to turn before the wind catches the other side of the elevator and snaps it through the 180 deg. Of course this is the same problem that we have with boats with normal sails and they get on OK.
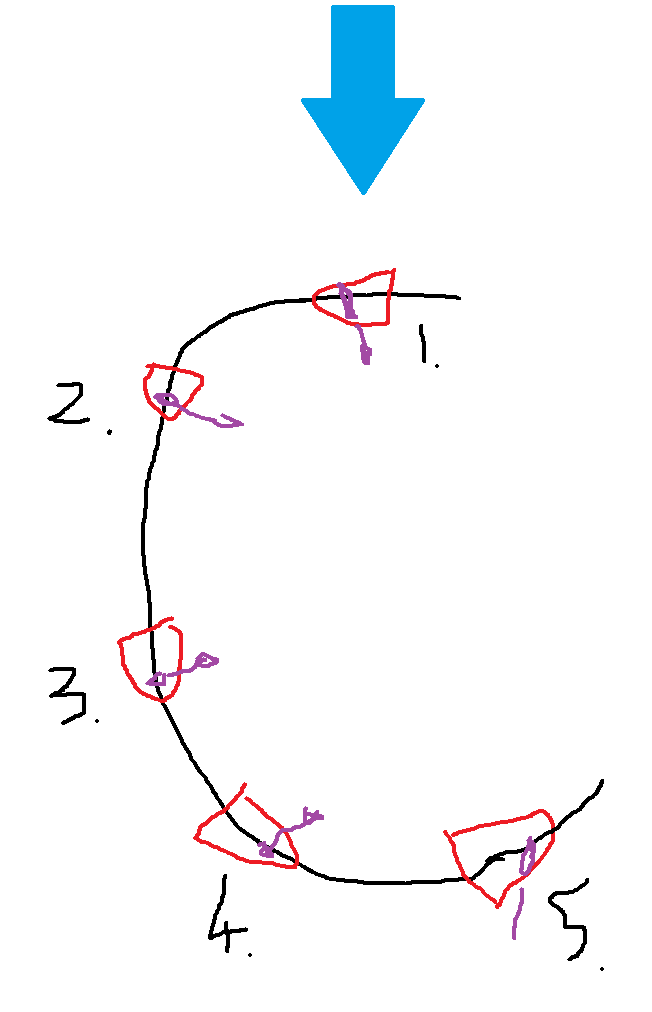
Excuse the bad diagram.
At point 1 your all good, the wing is not on the limit.
At 2 and 3 its on the limit, but this works well as it presents a big surface area where drag is driving you along
Case 4 is the bad one, its still stuck on the limit. But the airfoil is working backwards and because its on the limit you have no control over it. Really it should be on the other side of the boat.
Case 5 your OK again, you have turned far enough that elevator has passed through the wind and the sail has done that 180 swap on to the correct side of the boat again.
Once you have hit number 5 you can turn down wind again back to the same direction as case 4 and it will be OK again.
Depending on the angles your sailing and where the limits end up it may or may-not be a issue in real life. AP is not clever enough to do anything to help, but you could program downwind missions to head up to case 5 before turning back to 4 to avoid this case.
There is no issue when turning the boat into the wind.
Looking forward to seeing it! Happy to help if you need any pointers.
2 Likes
I agree with Pete. I also think it would be slow to have the wing sail trimmed for lift (vs max drag) going downwind, so limiting the rotation is probably faster.
I think keeping the rig light for this rotation could be important, when the sail hits the stop on the other jibe it can throw your boat into a big transient.
Here’s a clip of my boat jibing like Peter describes, not a wing sail though. (link supposed to go to 15:05)

Thanks Peter and Mike! Is 180 degrees of freedom the optimal amount? Or is there any benefit to a little more or less?
Still in the early stages of the build but here’s what I’ve got so far!


1 Like
Looking good!
As with everything its a big trade off.
More range means that you maintain control of over the wing for longer. Once your sailing on a heading where the wing is against the stop the only way to slow down, or de-power because your tipping over, is to change heading and turn in to the wind (and AP will not do this automatically yet).
Less range means the its easier to get the wing to swap sides in a gybe.
180 deg is probably about right.
2 Likes
I don’t know about the best angle, I just wanted to say I hope to hear some new shanties.
I love the super technical lyrics in your music.
1 Like
cool to see you in the sailing section, are you going for an endurance machine or distance? we emailed a while ago about the stl for prop guards.
The way the saildrone style wing-sailboats work is by having a freely rotating mast, which means they don’t have to worry about the violent torques from gybing the way a sailboat does, and they can always depower the boat. The way the high performance wing-sailboats like those of the America’s Cup get away with their very limited mast rotation is by sailing so fast that they’re pretty much always sailing into apparent wind, and they depower by heading up into the apparent wind.
If you decide not to have free rotation that gives you three options.
-
Choose a high range of motion, at least 270, and avoid sailing more half your range of motion off the wind. Instead of gybing you would “chicken gybe”, instead of a gybe where you bear away and turn your stern through the wind you head up all the way and basically do a massive tack to switch the side of the boat the wind is hitting.
-
Choose a range of motion 180 or less and accept that the wing will rest at the stops when running and reaching. The lower the range of motion you choose the more easily the boat will gybe and the less violent the boom swing in the gybe will be, but the range in which you will be able to fully depower the sail will be decreased.
-
Use a high performance planing/wave-piercing/hydro-foiling hull, have a very restricted range of motion, and rip around only ever sailing with an apparent headwind.
Option #1 is the probably safest way to get started. Option #2 will behave the most like a traditional sailboat and be faster than #1 in broad reach and running downwind. Option #3 will be the fastest, most impressive, and most likely to require a kayak to recover the remains of your boat.
Which ever you choose make sure you have some weather helm (natural tendency for the boat to turn into the wind) in case the rudder gets stuck or loose.
1 Like
A little off topic, but what do you think about it? 
https://discuss.ardupilot.org/t/navigation-charts-for-boat/81396?u=mckey
I’ve been testing some things in the SITL simulator and I’m running into an issue with the loiter behavior. It appears to be ignoring the wind direction and just doing figure eights in random orientations. Eventually, it tries to go directly upwind and gets stuck slowly drifting backwards. The image below demonstrates the problem (the wind is coming from the bottom of the screen).

I’m not sure if this is a recent regression or has always been a problem. I had issues with the boat getting stuck in the past, but I think it happened far less frequently.
Loiter just do random figure of eights. It sails until it hits the loiter radius, then it heads back towards the center it then keeps that heading until it again hits the radius.
So the first bit of your map there looks right. But as you say it should still not ever try and sail directly into the wind.
Can you share the log.