Hello,
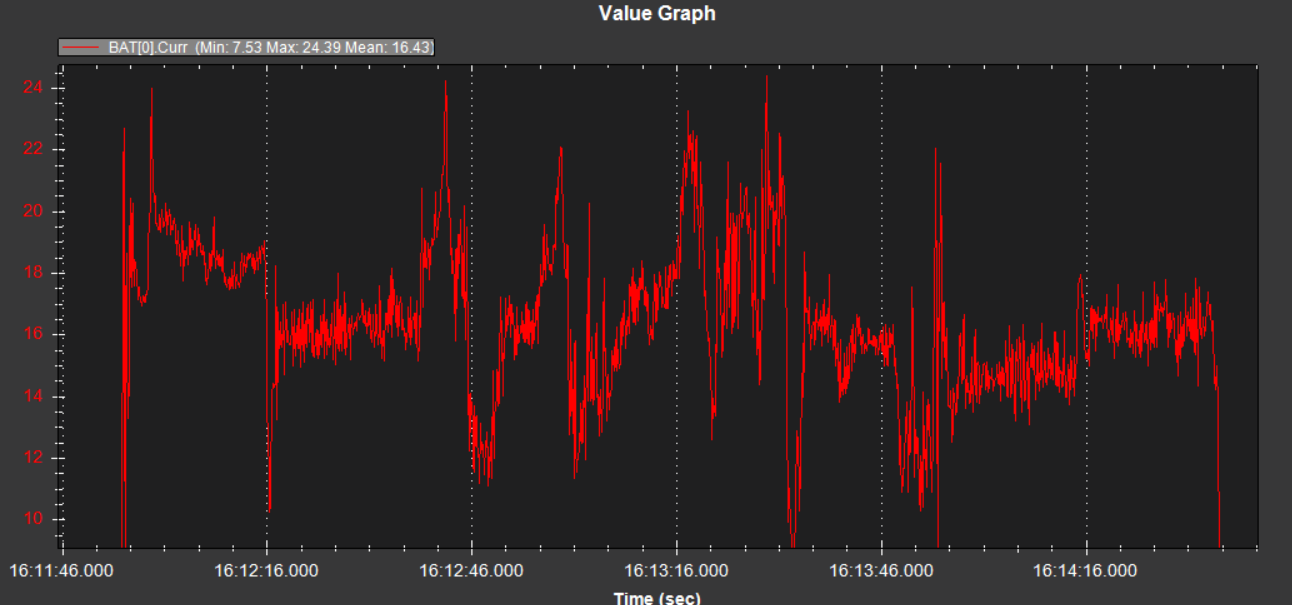
I have a 4300 mAh 3s Lipo which I use for my hex frame copter build. There is about 1-1.5V ish voltage sag on this battery when I’m flying. Now this voltage sag very often triggers a battery fail-safe at 10.5V for me. I can disable the batt FS and still fly around but I’m worried about damaging the battery. I’m only able to use about 800-1000 mAh (less than 25% of the capacity) before hitting 10.5V. Log here from my last flight demonstrating my issue.
I’m looking for advice on what I should do to extract the most out of my Lipo. Should I fly it with possible voltage sag to say 9.6V or so? Or is 3 mins of flight time my life now?
Maybe a newbie question but how do I quantify the load being too high for this Lipo in terms of voltage sag? My battery is rated at 30C for current so the average current draw (~20A) is well below the rating. The parameter MOT_THST_HOVER is also fairly low meaning each of the motors are also operating at light load far away from max thrust.
but why is it so difficult to send directly all needed information
Sorry, I don’t understand. Let me know if you would like supplemental info/data, I can provide.
Perhaps it’s just a shit battery and it can’t supply the current as @Juergen-Fahlbusch suggested.
I would fix the large output oscillation and tune this craft 1st.
I did some flight tests today in very gusty conditions, I believe the oscillations are largely due to that. I could visibly see the copter struggling in loiter mode to adjust for the gusts.
I doubt that’s the underlying cause. You are on default Rate PID’s and Vertical Controller gains. No surprise there is output oscillation.
I followed the instructions for P tuning for initial flights, as described here and found the default gains to be the best ones within the range of 0.08 and 0.135 which is why you see the default values there. Without wind, I do not see any significant output oscillations for my vehicle and the response is satisfactory for me. While there may be room for some sort of “optimal” PID tuning, that is not my primary problem. If I have 3 min flight times I do not have time to do anything with my copter let alone “optimal” PIDs. Which is why I posted my initial questions. ;))
How heavy is the drone? what motors do you have? What props? What ESCs? How old is the battery? Is it puffy? Have you set up filtering? Is the drone weight balanced? Are the motors equal or is there a torque imbalance?
Just because you can’t see “significant oscillations” doesn’t mean they aren’t there. Oscillations (even minor ones) means the motors are working harder than they need to. This will impact flight time. So tune is important.
It could be a very small hex @Arth_Patel we don’t know really much about your system.
But if the voltage is sagging as you described than either the battery is old or worse and or the current is to high. How much mAh you have to reload after your 3 min flight?
If you now lower the limits you will destroy your battery and probably your drone
This makes the battery worse with every flight.
It’s best to have the correct failsafe voltages set and never change them - you change the battery.
The only related setting I ever change is BATT_LOW_TIMER,5 to give an earlier failsafe than usual to make sure there’s plenty of battery for an RTL
Thank you all for your replies and patience. Please keep in mind I’m just starting out in the hobby and am just transitioning to doing things methodically instead of winging it so far, please be kind. I am open to reasonable reading and research, if you think I’m missing something obvious please point me in the right direction where I can learn instead of sarcasm.
Apologies it looks like it was deleted for some reason, re-uploaded here.
How heavy is the drone? what motors do you have? What props? What ESCs? How old is the battery? Is it puffy? Have you set up filtering? Is the drone weight balanced? Are the motors equal or is there a torque imbalance?
The drone is about 2kgs with the battery,
The motors are generic A2212 1400 kV BLDCs,
10x45 props,
Generic Simonk 30A PWM ESCs.
The battery is a fairly new Orange Lipo, not puffy at the moment.
By filtering if you mean harmonic notch filtering, not yet but I plan to do it soon.
The drone is fairly symmetric and balanced except for a slightly outboard placed ublox M8N GPS antenna and a 3DR air module. A quick suspension balance with the battery showed that the CG (x,y) is within a centimeter of the geometric center (also where my FC is placed).
The motors are identical so apart from any manufacturing tolerances they should be equal.
It could be a very small hex @Arth_Patel we don’t know really much about your system.
But if the voltage is sagging as you described than either the battery is old or worse and or the current is to high. How much mAh you have to reload after your 3 min flight?
If you now lower the limits you will destroy your battery and probably your drone
@Juergen-Fahlbusch I don’t believe it’s a “very small” hex. It’s the size of an F550 frame. I have to load in about 1400 ish mah after my flight. This number seems reasonable to me since I leave the drone powered for some minutes before and after my flights to experiment with the config. Why do you say it will destroy my drone?
This makes the battery worse with every flight.
It’s best to have the correct failsafe voltages set and never change them - you change the battery.
The only related setting I every change is BATT_LOW_TIMER,5 to give an earlier failsafe than usual to make sure there’s plenty of battery for an RTL
Noted, thanks Shawn. I plan to change my batteries as you suggest. After reading all the replies here it seems like my cell count is not sufficient. After browsing the internet for a bit it seems like different forums and people have different opinions on the choice of battery cell count for their vehicles. Could any of you please point me to a resource/thumb-rule/reading material which you consider reliable for choosing cell count?
You said somewhere before you are " a silent reader for a long time". So than you know that you only get good answers if you show before all necessary infos. If no one knows what kind of drone you are using how it is setup how can they give correct and best answers. This has nothing to do with sarcasm, mainly not in my case.
If you use 1400mAH by 3 min flight time you have a middle consumption of about 25-28A. But the system has to react on quickly on external influences which mean the momentary consumption can go up by factor 3 and more. And with you are going to the limit of your battery. That is the main reason of the sagging.
If your system fails during flight caused by battery problem it will fall down like a stone. It will crash!!
For a 2kg hex I would use a 4S 8000mAh battery or something in this ballpark, preferably something good quality, so not the cheapest ones.
Thank you for your recommendation. I will make some checks with these numbers.
You said somewhere before you are " a silent reader for a long time". So than you know that you only get good answers if you show before all necessary infos
Yes, I fully understand which is why I mentioned, whatever info is needed I will provide. I just need to know what info is relevant/needed here.
This has nothing to do with sarcasm, mainly not in my case.
My comment about sarcasm was not aimed at you, I appreciate you taking the time to provide your answer. It was mainly to deter stuff like this A hex on 3S? wow…. I apologize for any confusion.
If you use 1400mAH by 3 min flight time you have a middle consumption of about 25-28A. But the system has to react on quickly on external influences which mean the momentary consumption can go up by factor 3 and more. And with you are going to the limit of your battery.
If you look at the current loading from my log. It actually shows that my peak current never exceeds ~24A in flight. Shouldn’t the momentary consumption be shown on the plot if it’s shooting that high?
Consider a subscription to https://ecalc.ch/ The price of one month is less than a couple of propellers and will save you tons in the long run when you compare batteries, motors, props, etc.
Did you calibrated your current measurement correctly as the value BATT_AMP_PERVOLT is on default?
I calibrated the voltage reading but I wasn’t aware that I also needed to calibrate the current reading. I read on the wiki that for a Pixhawk with a 3DR Power module that value is to be kept 17 and so let it be. After some googling I found this article and will use it to try and calibrate BATT_AMP_PERVOLT. Thank you!
Consider a subscription to https://ecalc.ch/ The price of one month is less than a couple of propellers and will save you tons in the long run when you compare batteries, motors, props, etc.
I was just messing around with the free version a few hours ago and found it quite useful. I will consider subscribing and playing around a bit more, thank you for the suggestion.
I am still a bit lost on how to choose the cell count for my batteries depending on my motor specs. Any ideas where I can find more info on this? A google search does not turn up very useful results.