Hey Guys hoping someone can help me out. Been stuck on this problem and am only making it worse the more I do to it, have looked at other forums and videos but cant find a solution.
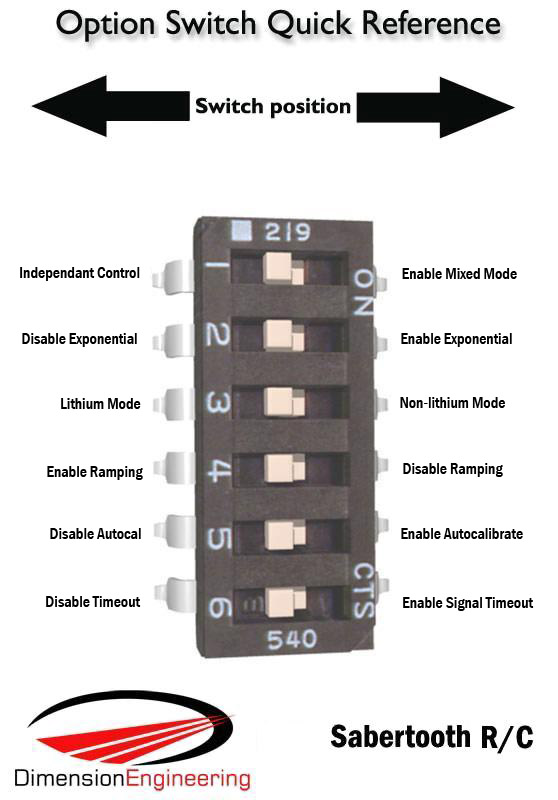
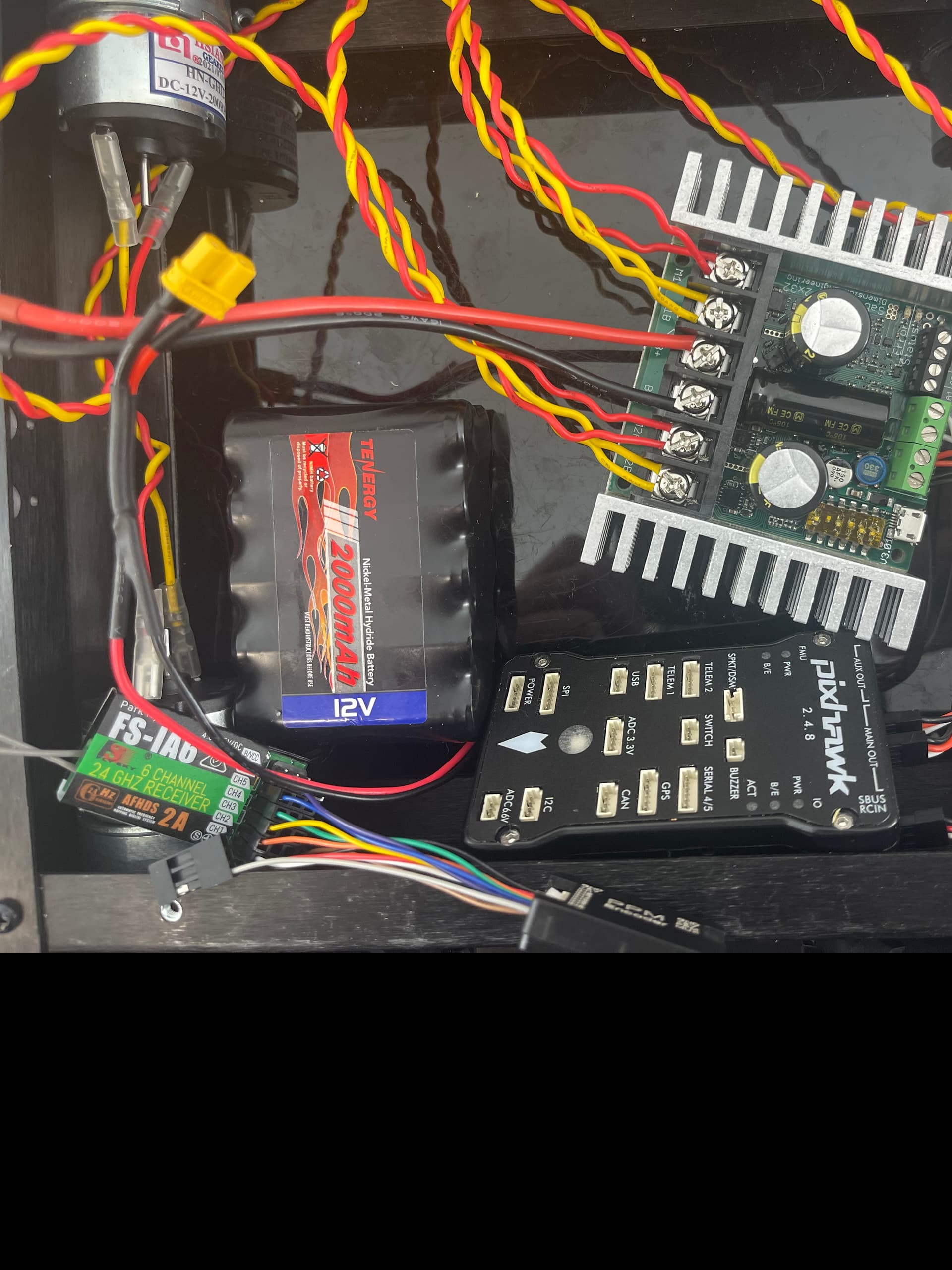
I have hooked up the sabertooth 2x32 with 4 200 rpm geared motors. Using the Flysky FS-i6 controller with fs ia6 receiver.
It works perfect I can get the rover to go forward and back and turn left and right.
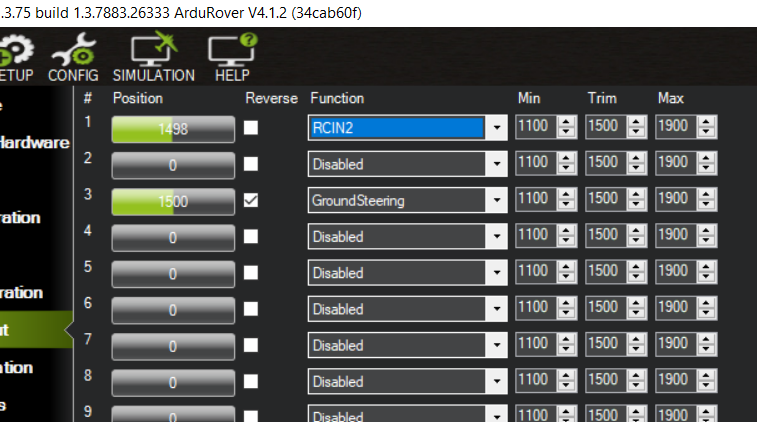
Using the left side of controller Channel 3 moving rover back and forth and right side of controller using channel 1 turning left and right.
You do not mention any specifics about the ardurover setup you have done. A skid steering rover will not move at all when it is disarmed. But have you armed it? Did you finish the calibration steps and the basic configuration?
There is no shortcut to a working setup. You have to follow the docs step by step and make sure you understood and set everything. If you got specific questions to any step, please feel free to ask again.
Hey Sebastian, sorry I skipped through couple steps. Went back and worked from beginning to end and got it up and running. Thank you for the help. If anyone has the same problem just slowly go through the steps.