Good afternoon. How to connect sabertooth 12a to pixhawk 2.4.8 control using gps in the mission planner program so as not to connect the remote control?
Pixhawk 2.4.8 isn’t supported by current Ardupilot versions, so you’ll need to find old versions of both Ardupilot and Mission Planner.
Scratch that, it is supported. The below still applies.
Then you set up your rover as documented here. Sabertooth 12a is your ESC.
@Oli1, typically “Pixhawk 2.4.8” refers to a cheap clone of a discontinued, somewhat old product that used an F4-series STM32. It is still supported, usually by the “Pixhawk 1” target.
See: Pixhawk Overview — Rover documentation (ardupilot.org)
While I wouldn’t recommend using such a board, it can indeed run the latest versions of ArduPilot and be configured to control a Rover that uses a Sabretooth driver, per the documentation.
1 Like
Oh, I stand corrected. Always assumed they were 8bit
What many of them really have in common today with the older APM-style hardware is that they are sold as “genuine” at insane markups. It’s a shame…
1 Like
Good afternoon. Thank you for the link, I hope I can link it all up!
Tell me, you need to connect two servo motors to turn left to right. Can they be connected with one common contact or separately and join them synchronously? And what kind of contacts can you use for a Rover for servo motors? 2 questions connecting sabertooth 12a to what contacts on pihwawk 2.4.8 for the pixhawk 2.4.8 autopilot without joystick connections?
You’ll see a lot of talk of “ESCs” and such around here - the Sabretooth is your “ESC”
You’ll run a 3wire connector from the FC to the Sabretooth
If you’re using a 2x12 Sabfretooth, you’ll run TWO 3-wire dupont connectors, one for the “left” and one for the “right”
You’ll power the Sabretooth directly from the battery or from the power module - make sure the power module is rated for the power you’ll need.
Now the Sabretooth controls the brushed DC motor you’re planning to use.
The FC just controls - via the PWM “RC” input to the Sabretooth - how the Sabretooth controls the motor.
At least, that’s how it should all work. I haven’t used a Sabretooth - I use RoboClaw motor controllers instead, but they’re very similar.
I’m using a par of 24VDC wheelchair motors, and 2x60A controller, in a skid-steer rover.
And the 2 servo motors on one side and on the other side of the nozzle, do they connect together in the mission planner cable or separately each and then in the program synchronize? And how do you hook it up so that they’re in the front and the rover’s in the back with one sabertooth 12a board with two engines?
If you have two motors, you need a 2x12 controller, or two 1x12 controllers.
You run one 3-pin cable from the Flight Controller to one motor controller input. If you have a 2x12, you run two 3-pin cables.
Check the documentation on the Sabretooth on where to connect up, and which set of pins is for which motor input/output.
You then hook the Sabretooth to the motor. Again, hook the left motor to the left controller, though it doesn’t really matter as long as you know which is which and for which purpose - they’re functionally all the same. It’s usually left vs right, but it could just as easily be front to back, or one motor to propel the rover and the other runs your payload motor for some other purpose.
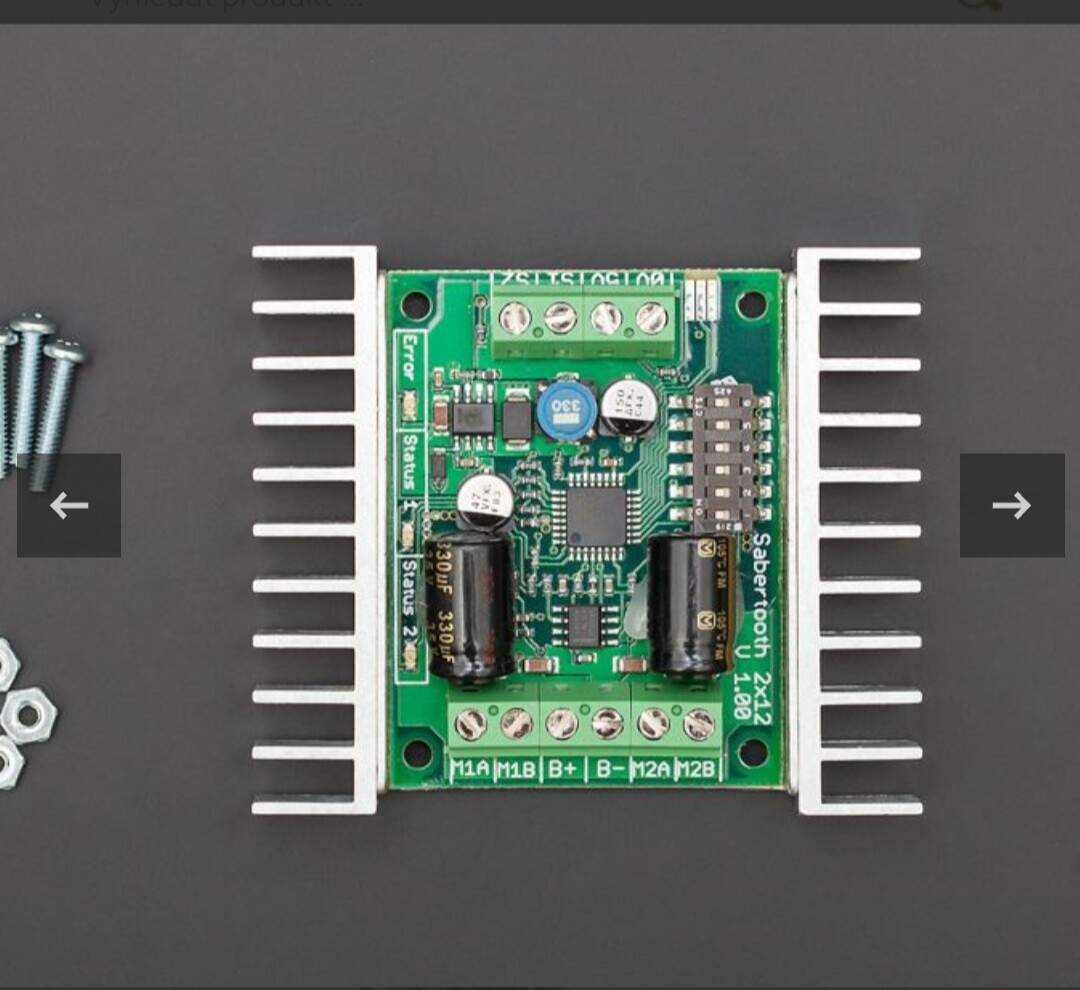
Microsoft Word - Sabertooth2x12.doc (dimensionengineering.com)
Mode 2 - RC INPUT