Hello, is it possible to make avatar helicopter with arducopter ? the system simply consists of two vectored engines. Can act independently of each other. @rmackay9 @GregCovey

[Avatar style Bi Copter - ArduPlane / Plane 4.0 - ArduPilot Discourse]
1 Like
Yes, I agree with @JoeBreznai that this is a Bicopter which runs with the regular multicopter firmware. We don’t have much in the way of setup instructions but you’ll need to set the FRAME_CLASS = 10 (BiCopter) and there is a motor/servo mapping image here.
2 Likes
hi, does arduplane support swashplate ? I want to control the propellers like a helicopter on plane frame
Like BELL V-22 Osprey VTOL. Swashplate system on that V-22. So it can stay balanced with two engines. Is it possible to make this system with arduplane or arducopter?
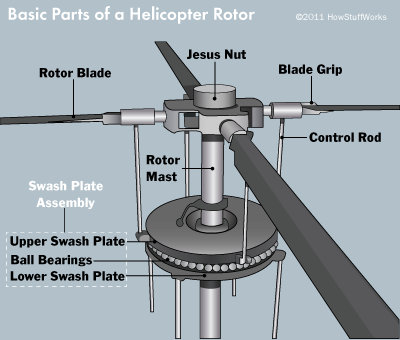
This is an expensive rotor system and they are complex too. I think this might help https://ardupilot.org/copter/docs/traditional-helicopter-swashplate-setup.html
1 Like
AP’s TradHeli firmware can support two rotors like a Chinook and they can be placed either front-back or left-right but they are assumed to be fixed. I think if those two rotors are going to rotate (like a bicopter) in order to control the pitch of the vehicle then you’ll need to use the bicopter configuration.
Plane’s VTOL code supports all the various multicopter frames including bicopters but it doesn’t currently support plane+tradheli (there is some experimental code around somewhere but I can’t recommend trying to use it). I suspect you could get it to work if the swash plate servos were setup to be controlled by the bicopter’s two throttle outputs.
@prodha the arducopter firmware used for helicopters does not support a V-22 frame. I don’t know much about the tiltrotor frame in ardupilot but there is a swashplate library in the AP_Motors class that is used for helicopters. So it probably wouldn’t be too hard to pull that into the tiltrotor frame and make that an option as opposed to the nacelle tilt which I anticipate they are using to provide pitch (elevator) and yaw control.
Yes, it works if the swash plate is connected to the gas outlets of the bicopter, but other direction controls of the rotor head do not work. When to mix plane+tradheli code ? I don’t think it’s too hard. I really need a plane that works with 2 engines (with rotor head like BELL V-22) It has been written many times on the forum, but there is still no code. Should we collect signatures to help developers ? ![]()
Hi, I agree with you. It shouldn’t be too hard. Because there is a library ready. Just need someone to mix them. If the test subject is wanted I can be me  @rmackay9 What do you think ? Thx
@rmackay9 What do you think ? Thx
I wanted to build one identical to yours, but I don’t even have a 3D file or any plans with measurements or shapes to make it in fiberglass, would you be able to help me in any way?