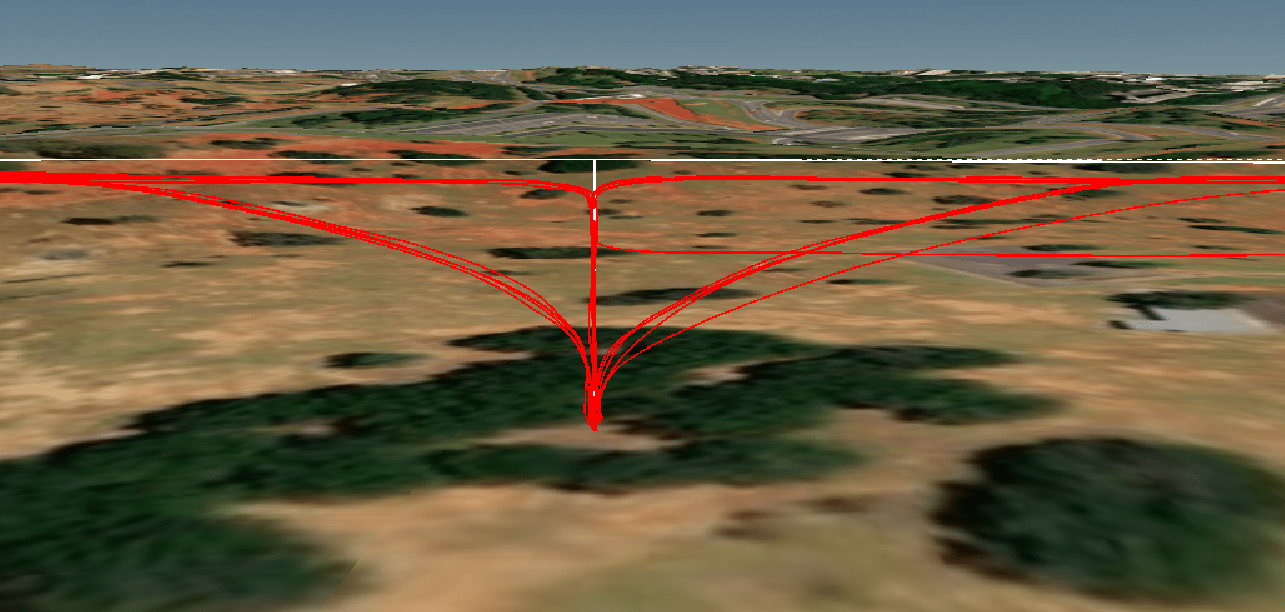
I’m just dropping by to show an example of a real flight with Copter v4.1. In this case, it is the difference between approaching a waypoint between trees with and without the S-Curve.
In this case, the vertical approach is much safer, moving the quad away from the trees in a clearing:
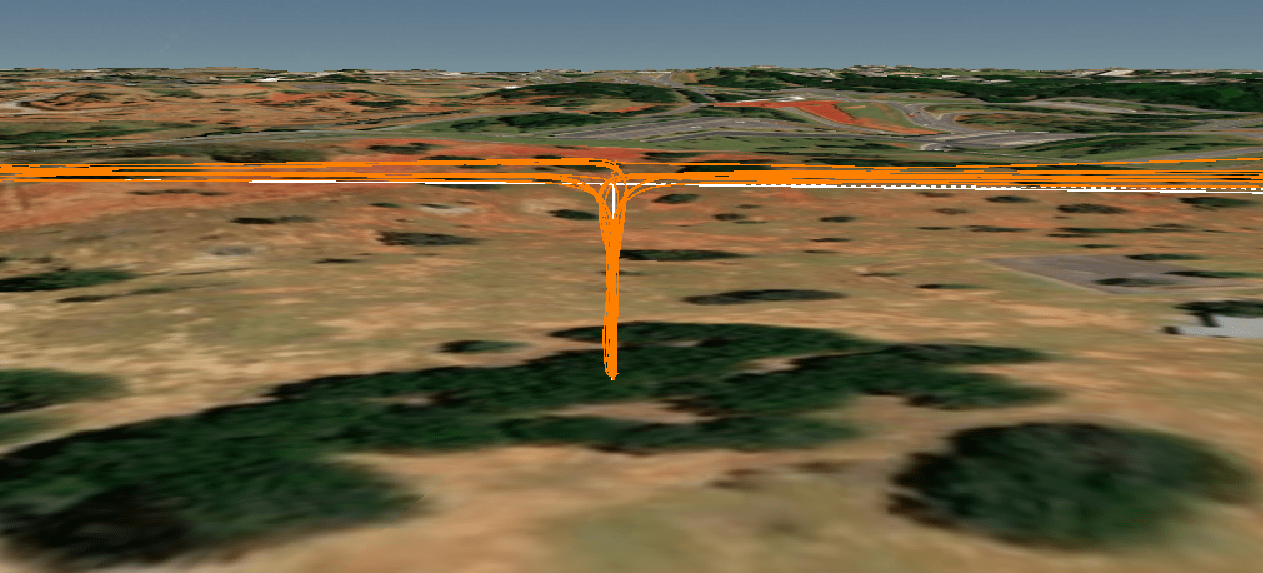
Blank is the planned trajectory.
In red is the quad flying with version 4.0.7 WITHOUT S-Curve
In orange is the same quad flying with version 4.1 WITH S-Curve
Hopefully most people will be able to see the difference (and like it). The difference is subtle at low speeds or straight sections of a mission but at high speeds or it tight intricate missions with lots of corners the S-Curve improvements are obvious.
A couple of things that people have noticed (and perhaps not liked) is:
the vehicle may travel too slowly if there are intermediate waypoints (e.g. the mission has long straight paths but there are intermediate waypoints along the path)
the vehicle may complete the mission more slowly than in 4.0. This is really just because the vehicle is not cutting corners anymore though so it is now just doing what it’s told properly!