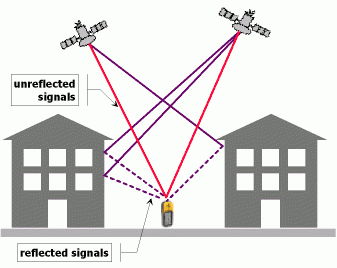
It looks to be normal GPS inaccuracy. Out in the open GPS can be very good, but around those buildings there could be multipathing even though you’re high up.
You could probably improve accuracy by making a ground plane and fitting it directly under your GPS unit. Connect it to common 0v (battery negative) with just a small wire. I’d say copper circuit board would be better than aluminum foil shielding, something ferrous (steel/iron/tin) or mu metal might be even better.
There’s even nicer looking ground plane designs around:
Things look reasonably good in those logs.
Since your voltage and current monitoring looks good, do the Compass/Motor calibration procedure - be careful as it can be dangerous if instructions are not followed correctly.
This will help to improve compass accuracy and yaw, maybe even position a bit (hopefully??). You’d redo this after you make and fit a GPS ground plane too.
I’d like to suggest some slight changes but these wont directly affect you problem.
FENCE_ENABLE,1
This will prevent arming until you’ve got a good GPS 3D fix - check your other fence parameters too. It means you’ve definitely got a good home position set where you arm.
And these for a little better safety:
BATT_ARM_VOLT,14.7
BATT_CRT_VOLT,14
BATT_LOW_VOLT,14.4
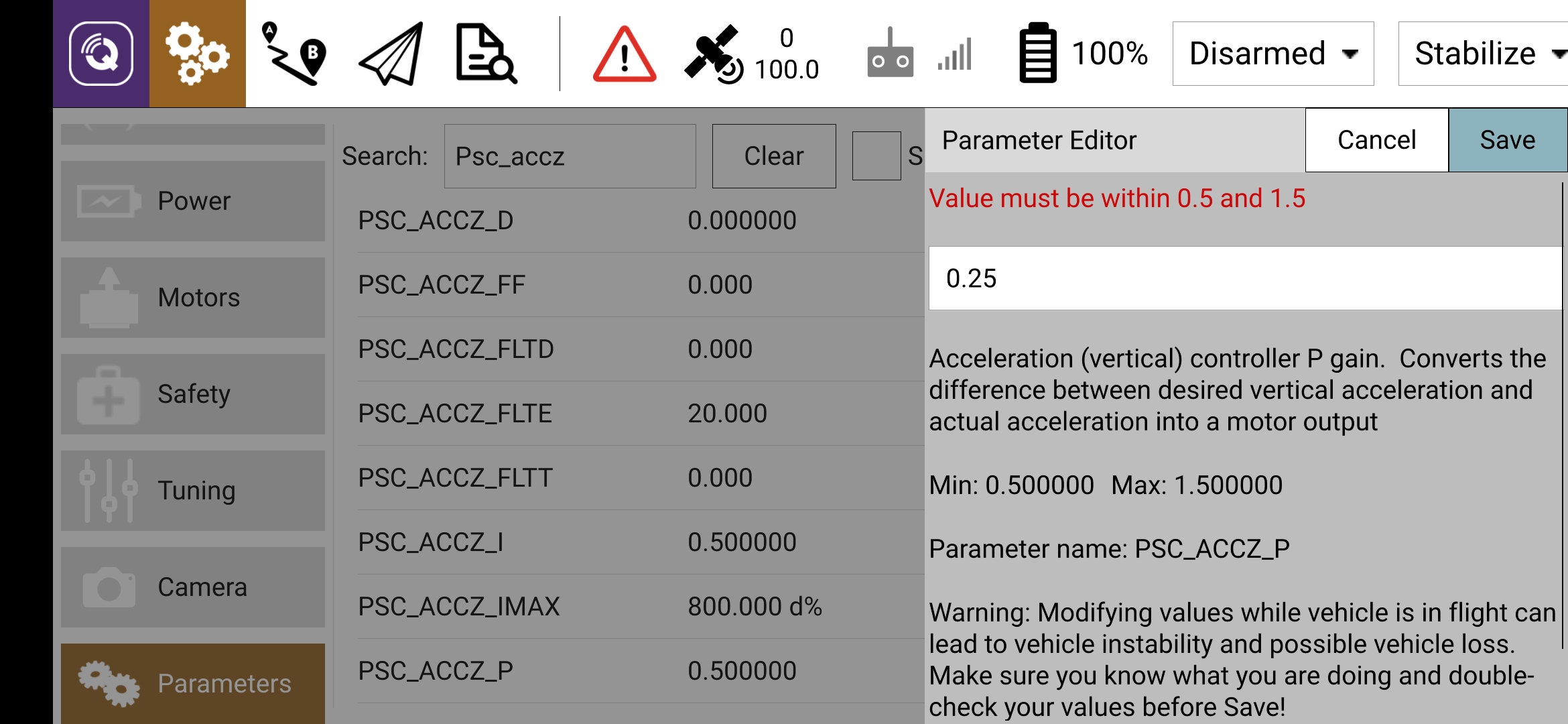
And these for a bit better tuning, you can safely change these right away:
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.5
PSC_ACCZ_P,0.25
MOT_BAT_VOLT_MAX,16.8
MOT_BAT_VOLT_MIN,13.2
I’m guessing 9 inch props, these are optional, yours were close but could be better:
ATC_RAT_PIT_FLTD,23
ATC_RAT_PIT_FLTT,23
ATC_RAT_RLL_FLTD,23
ATC_RAT_RLL_FLTT,23
ATC_RAT_YAW_FLTT,23
INS_GYRO_FILTER,46
MOT_THST_EXPO,0.63
You could run an Autotune again after changing all that, if you like.
The best advice is one I have used to Land on a boat. Set the RTL altitude command in the Mission to something above takeoff elevation. 3m say. After it has reached that position and is holding switch to Loiter then land in whatever mode you like.
I’ve found through “experimentation” (frustration) that if you have a Fence enabled, even disabling GPS and taking GPS out of arming checks, Arducopter will wait indefinitely for a good 3D fix before it will arm.
So if you plan on any non-GPS flying, or wish to take off (say in Stab or AltHold) before GPS is good you also need to have Fence disabled. The default is disabled.
Personally I’d recommend always having Fence enabled, then you know home position will be set correctly when you need it most.
It’s no big deal to stand around waiting an extra couple of minutes for 3D Fix before arming - saves spending hours trekking through the countryside or suburbia when your copter decides home is in the sea near Japan.
(Developers: I know there’s internal checks before setting home position, it makes a good story though)
Shawn’s right that the Fence is a valuable Failsafe to enable. The way I fly it tends to be a hassle so an alternative is to always Arm in Loiter mode. If it arms you are good and can switch to whatever mode you want to launch from. The threshold for this in Hdop can be set if desired (GPS_HDOP_GOOD). The best option is to have telemetry on your Transmitter!
Some time (only night time) no more then 13 satellite catch , and showing this error , but mobile app gps satellite viewer show more then 25 satellite how it’s possible.
Just the number of Sats is not always a good indicator. Arducopter is also looking for good horizontal accuracy (HDOP) and low vertical and horizontal speeds, meaning the GPS position has settled.
HDOP of less than 1.0 is what you’re after.
Hmm , i don’t use geo fence and when I connect a battery , wait only 20 to 40s and satellite number is more than 15+ (shown in jumper t-16 lua script)
Thank you soo much
Ok sir , sure , there is some problems I’m facing
1)- i don’t have a pc and laptop so I’m not use MP
2)- I’m pushing everything in mobile app QGC , so it’s not provide more features.
I hope you understand
Ohhh , yeah sir this idea work good firstly when I armed my copter , then I reach more then 3m and land after on my work. This is very very helpful sir , thank you.
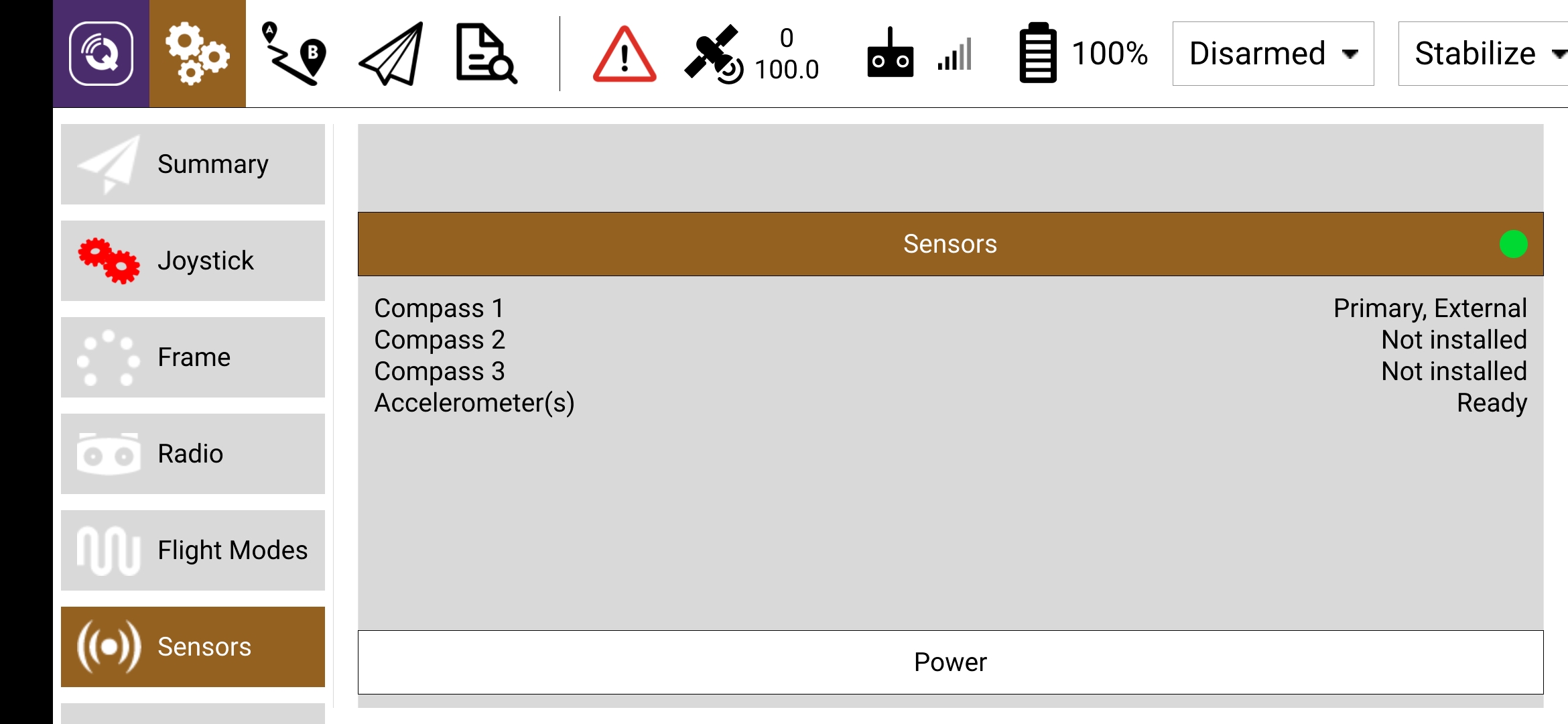
It means when I change anything then , when I’m flying that place calibrate compass , but today see this thread and I’m shocking my copter has only 1 compass ? And it’s “External” how it’s possible??? And put in this position.