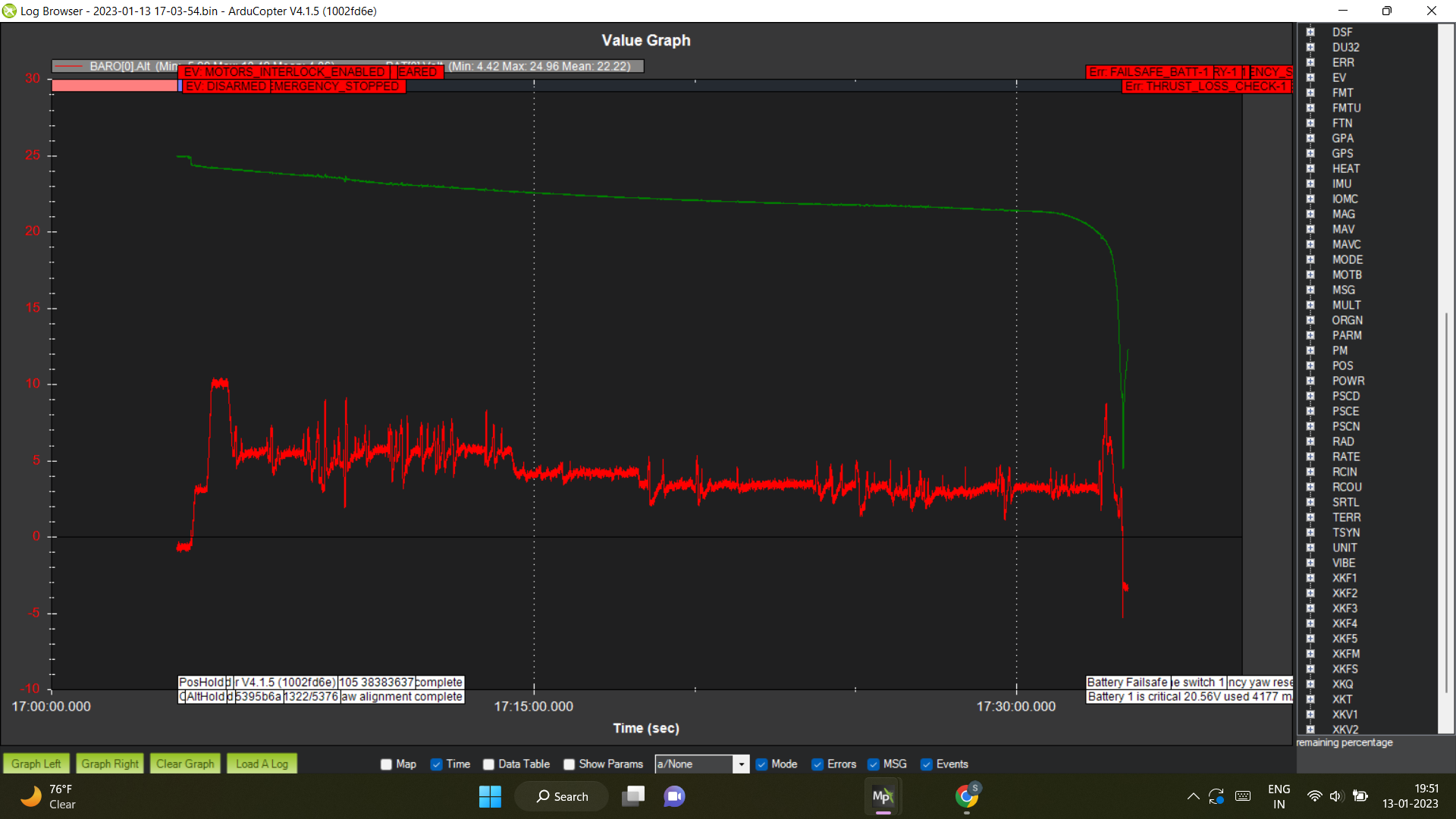
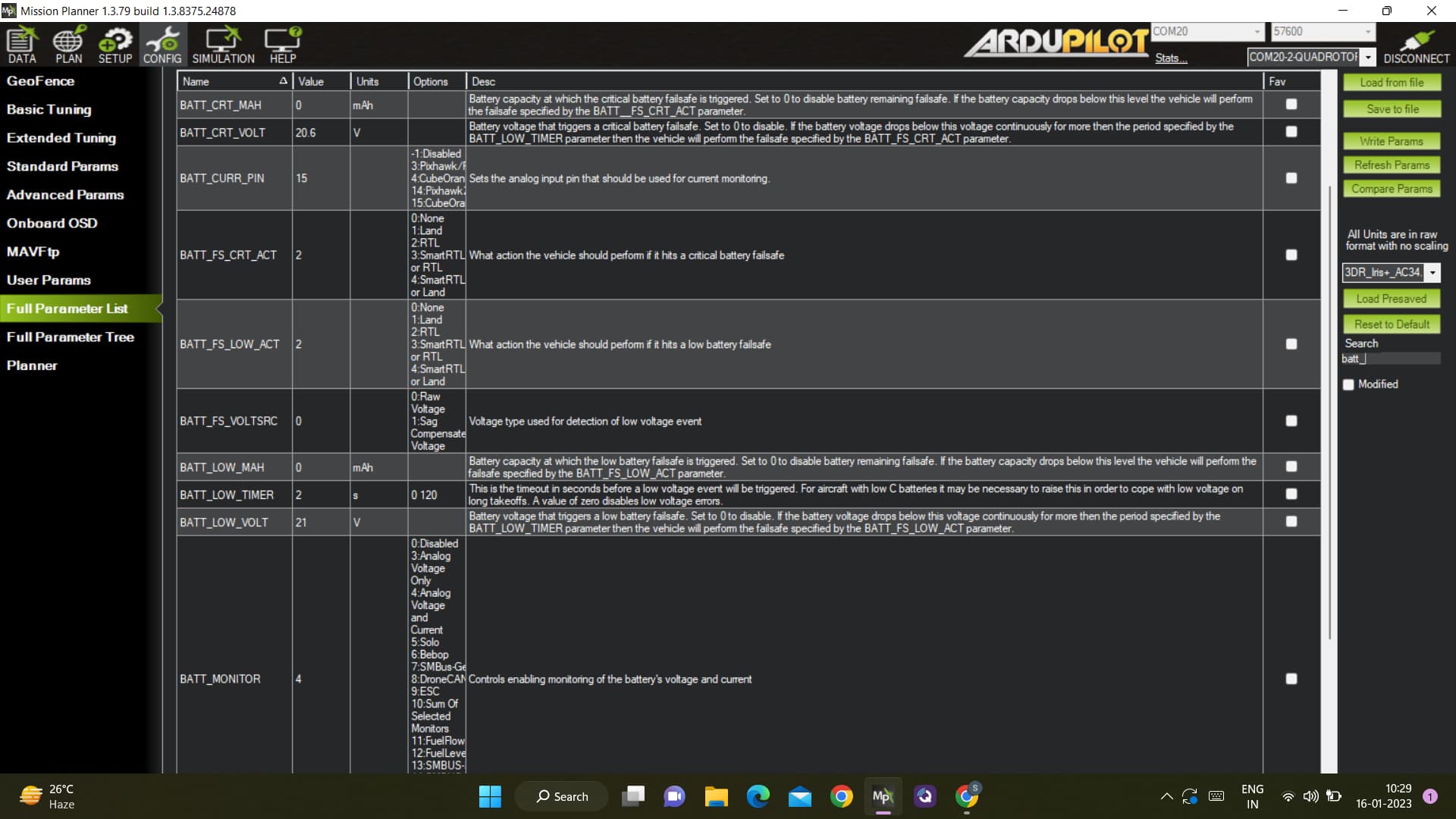
Battery critical voltage was on 20.6V even after the battery critical voltage triggered, RTL was not triggered so i did not understand this can someone please help me with this.
hence my drone crashed.
Log file analyser -
Size (kb) 79069.970703125
No of lines 849809
Duration 0:29:34
Vehicletype ArduCopter
Firmware Version V4.1.5
Firmware Hash 1002fd6e
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:53.17, Y:-5.24, Z:331.90)
WARN: Large compass offset in MAG data (X:53.00, Y:-5.00, Z:331.00)
Large change in mag_field (55.13%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: CRASH FS_BATT
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘QUAD/X’
Test: NaNs = FAIL - Found NaN in POS.RelOriginAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Screenshot of log file showing battery critical voltage-
Here’s something similar… Someone learned an important lesson.
Looks like they only had a “warning” set up (no idea what flight controller system was in use) and against the manufactures recommendation the pilot lowered the warning level voltage from 44 to 42, and with such a high takeoff weight there was not enough time to land.
The pilot also did not check the battery voltage prior to takeoff.
Our “standard” ardupilot recommendations for 12S are
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
So by the time the battery gets to 42, you want to be already landed or very close to being landed.
And with an increased payload you might want to slightly increase those standard values
or decrease BATT_LOW_TIMER
You have both actions set as RTL…
My question would be: if you’ve hit low battery level and started an RTL, and during RTL you hit critical battery level - what do you expect to happen then?
Continue RTL until the battery sags to the point of the ESCs and motors stopping, or the flight controller just stops as it’s regulator drops out?
EDIT: the PR by Peter Hall fixes that where the failsafe action is NOT ignored. But my question still stands
My point is you need to set two different actions because the state of the battery is different in each case.