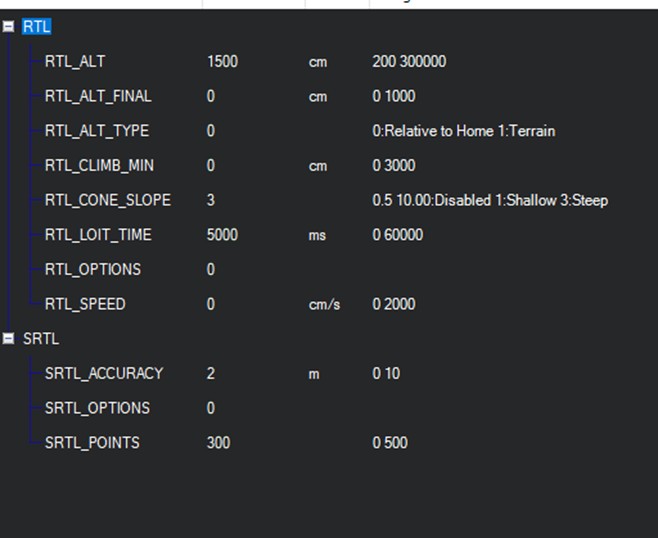
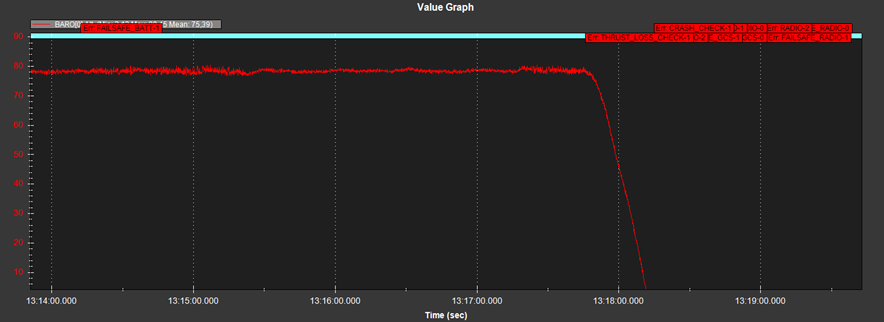
but the system did not reacted and never passed to RTL.
According to my parameters , I was expecting a different behavior.
Is this a problem of my parameters or there is something else ?
Any ideas ?
Thank you in advance for your time.
With best regards
Ioannis
The issue is that your critical and low voltages are the same (BATT_CRT_VOLT, BATT_LOW_VOLT). Both are 21. You have no critical action but do have RTL as low action. Because the two voltages are the same it went straight to the critical action (of nothing) and skipped the low action.
We should update our pre-arm check to catch this issue.
Definitely set these:
BATT_LOW_VOLT,21.6
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
It’s important that both the LOW and CRT values and actions are set correctly. You could get a LOW trigger and the copter starts an RTL, then there is a CRT trigger during RTL and it should land - for example.
Many people seem to think that wouldnt happen and they can just set one or the other, or RTL will always work, or the battery wont start going bad in-flight.
Or worse still - they can monitor these things themselves and not set any BATT_FS actions, believing they will never be too busy to look at voltages on a GCS or hear a battery alarm in the distance…
And testing…
Dont trust that battery ever again - only use it for bench testing, or dispose of it.