Hi, I’m trying to get my Pixhawk orange cube set up with 2 ZED-F9P GPS RTK modules (1 rover and 1 base). For my project, I need very precise GPS data, so when I calibrate my base, I am setting the Survey In accuracy to .5m (I actually need <.1m but for the sake of time and testing I am using .5m). However, the survey keeps ending with about 4-5m of accuracy and a smaller observation time then the minimum I set. Does anyone know of a setting or hardware issue that might resolve my problem? any help would be fantastic.
Perhaps increase the “survey time in” to 99999 to let it cook longer.
Yes, increase the survey time for sure, but not longer than you’re willing to sit and wait. It’s my experience that as long as you set a low accuracy value, it will run until it achieves that value. It should never exit the survey mode until the accuracy value is achieved. The min time is (supposed to be) useful to achieve better than desired results for letting it run a little longer, even if it achieves the desired accuracy.
Achieving less than 0.1m accuracy on a self-surveyed position is highly likely to take quite a long time to complete. The best I ever achieved was about 0.2m after 24 hours.
In my case, I need precision, but not pinpoint geographic accuracy. As long as I use the same self-surveyed position for my fixed base, I get repeatable results, regardless of their correlation to the actual lat/lng. If you only need repeatable results, there isn’t much reason to struggle with a super accurate survey.
On the other hand, if you need true geographic position, a self-surveyed position is ALWAYS only an estimate. If you have access to an NTRIP server within about 20 miles, use that to pinpoint your fixed base, and set the coordinates manually. That should result in better overall accuracy every time.
1 Like
Adjusting either of the mission planner settings (time or accuracy) did nothing to change the final results of the survey. I think it is because I had previously configured the survey settings in Ublox U-Center, but I’m still not confident. By adjusting the precision settings in U-Center, I was able to get better survey data, however, now the reset button in mission planner doesn’t do anything. It just randomly runs surveys but usually doesn’t. I only get survey data randomly so it’s pretty useless right now. And, for the project I’m working on I need precision and accuracy, so I am hoping to eventually let it sit until I can get 0.1-0.2 m accuracy. For anyone using an F9P (or M8P) how is it configured in U-Center? and what boxes are checked in mission planner?
Update the firmware first. This is a decent guide.
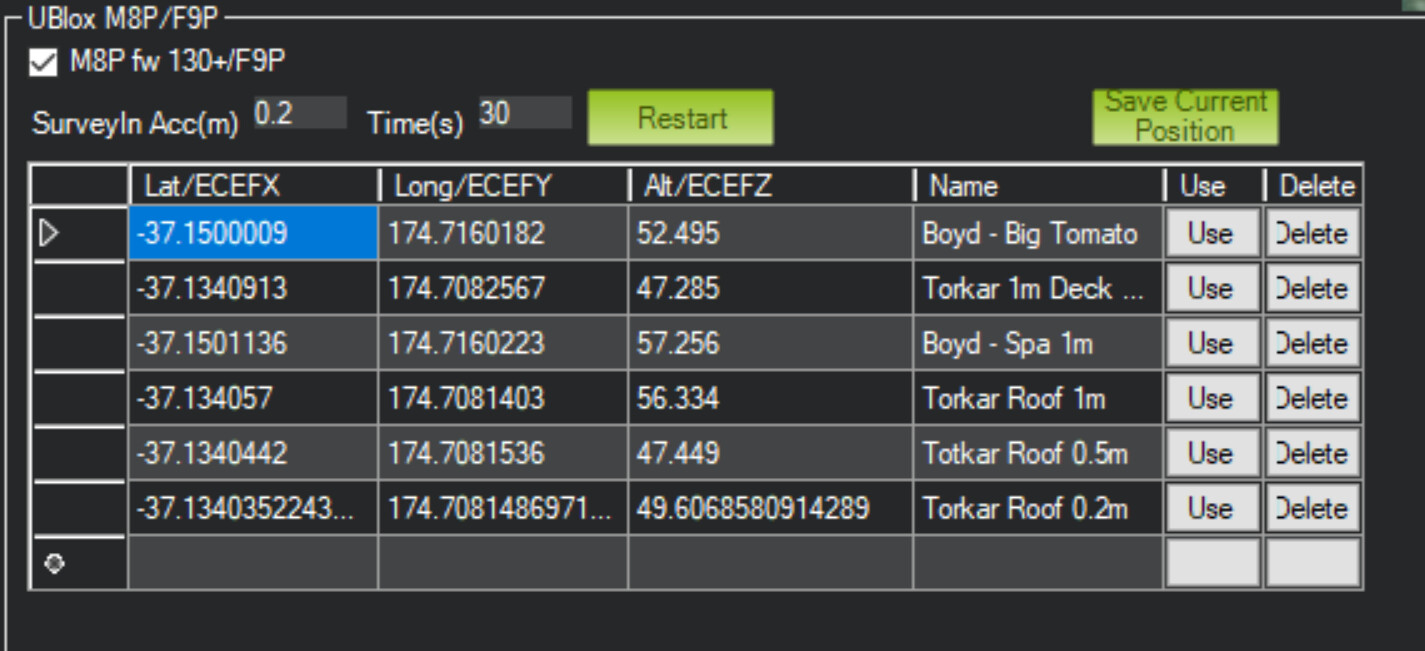
Make sure the “UBlox M8P/F9P autoconfig” box is checked, and then check the one regarding 130+ version firmware.
After that, you should be able to do everything within Mission Planner rather than trying to tackle the steep learning curve of uCenter.
Once the survey completes, you can click “Save Current Position” and then choose to use that fix in the future.
Also, if you fear you’ve made a change that Mission Planner is not auto-configuring, you can reset to the default configuration in uCenter. Check out @ktrussell’s video at the 15:30 mark for a demonstration.. The rest of that video may also be illuminating for you, as he does a lot of configuration for RTK from within uCenter.
2 Likes
Thanks!! Unfortunately, I still can’t get mission planner to adjust the survey in parameters, but the reset button now works. So as long as I set my desired accuracy in U-center everything works. I’ll post another update if I can fix it. But if anyone has any clue why this is the case please let me know. I’m using a ZED-F9P on the most recent firmware - 1.13.
I think there’s a fundamental misunderstanding here…
There’s 2 components to error in any RTK system.
- The first component is the error of the base itself compared to what is perfect. In today’s age, we can commonly get down to about 1cm of error, but that takes a LOT of time and usually a network of other accurate base stations to determine. In this case, you actually treat the base like a rover until you stick with a position. This is generally how you make a project “accurate.” Keep in mind no base station is perfect as continents constantly shift and we’re just doing our best to estimate long-term errors.
- The second component is the error between the local base and rover, and that’s mostly dependent on the distance or “baseline.” Usually spec sheets show about 1cm of error plus 1mm per km of baseline. This is what gives your project “precision” even if your local base doesn’t have an accurate location.
For your project, you may need to ask yourself what really needs to be “accurate” and what just needs to be repeatable or “precise.” If you only need repeatability, just estimate your base position once, accept that it will have up to 0.5m of error, and assign those exact coordinates to your base instead of “surveying in” every time you set up. Just put it in the same location over the ground every time and you’ll have the precision you need. Finally, if you’re using GNSS coordinates in a WGS datum, there’s a good chance that your mm-accurate coordinate will be moved by a few mm every year or even month depending on where you are at in the world due to your tectonic plate moving, so getting a highly “accurate” base position isn’t that important anyway. RTK is just relative positioning relative to the base, and as long as the base position assignment is close to the real location of the base, it’ll work flawlessly.
1 Like
follow up question on accuracy. I just spent ~5 hours with mission planner "surveying in " to 0.2m accuracy. F9P and a survey grade antenna on top of the roof.
Question - how to interpret the 0.2m - is it +/-0.1m (ie within 0.2m radius) or is it +/- 0.2m (ie within 0.4m radius)
+/- 20 cm radius accuracy with 95% probability.
There is a 5% probability that it will be worse than that.
Take a look at the ublox documentation for a more exact definition
1 Like