i want to use a NTRIP GPS Inject and use a swiss NTRIP host called swipos. Now i can connect to the swipos host, but then nothing happens. The Staff from swipos told me the connection is ok, but there are no Position Information from my Rover (Drone with pixhawk 2 and Here+ GPS). Positioning Information must be in NMEA GGA Format.
Anyone can help? i’m pretty new to this stuff, so if you need more Information, please tell me!
is the data free to access? what is the url?
MP does support GGA, but you need to be connected to a drone and have your home location set correct for the GGA to work
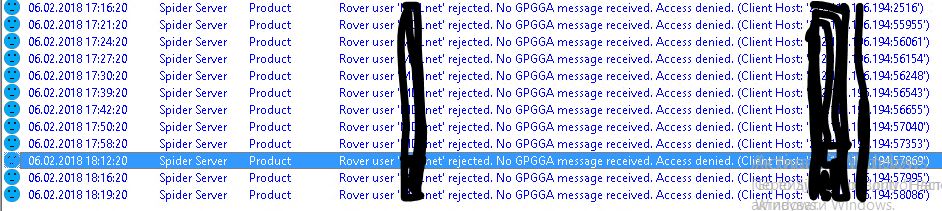
@juere76, Dear Topicstarter, have you found solution for this issue? I’m operator of largest RTK network in Ukraine (about 150 sutes) also based on Leica’s soft. We faced with the same problem: users could not use nearest base station or streams from base station networks due to no streaming initial GPGGA message to server. @Michael_Oborne, have you ever successful test this feature? Now we have possibility to organize free tests, it will be extremely nice if you kindly help us to do it. Could you please describe us short algorithm of appearing data for GPGGA message and streaming it to server, how we can be sure that string is going out from MP? Is it possible to create static string for testing and transmit it to server periodically?
Regards, any help will be appreciated.
@Yuriy_100, yes it seems there was a minor decimal point error when the MP sends the drone position to SWIPOS NTRIP System. MP developer has fixed the code and it works now.
You have to download the newest version of Mission Planner (newer than Beta).
Go to Mission Planner, click on Help page, HOLD DOWN CTRL BUTTON AND PRESS “CHECK FOR BETA UPDATES”
@juere76, Could you please to describe or make screens with your configuration, maybe some other configurations have to be done? If you read some manuals it would be good to have links on it.
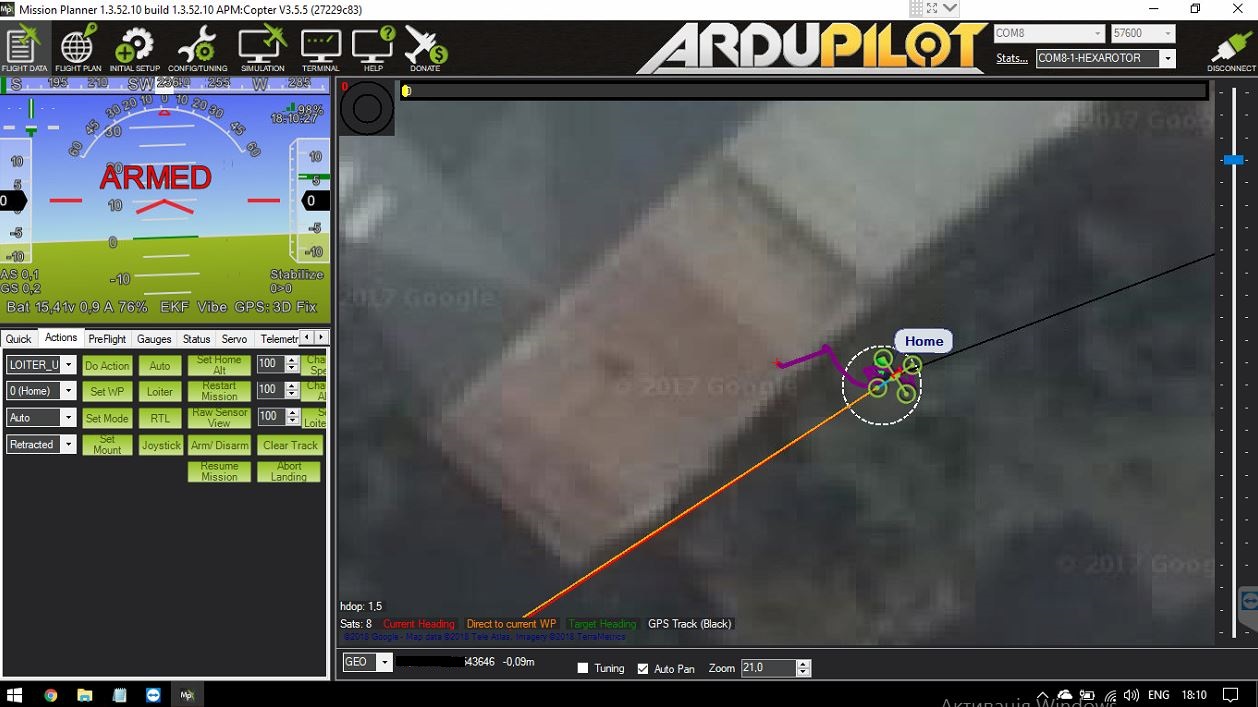
How can I check that the Home point properly created and GPGGA string correct is issued?
I was wondering how do we set the Home location. Is Arming, as shown on second picture (with Home label), enough or something else should be done ?. Thank you. Here is what I did:
Could you guys please trace why coords from home position fields in Flight Plan tab do not make it to the NTRIP. I assume they do not make it here, as Yuriy indicated the Server does not receive GGA message and that happens when sentNMEA() method has zero valued coords.
I’m unsure if this is related, but my NTRIP connection through Mission Planner only works for single-station corrections. I cannot get “network” corrections that average or create a correction for positions between multiple base stations.
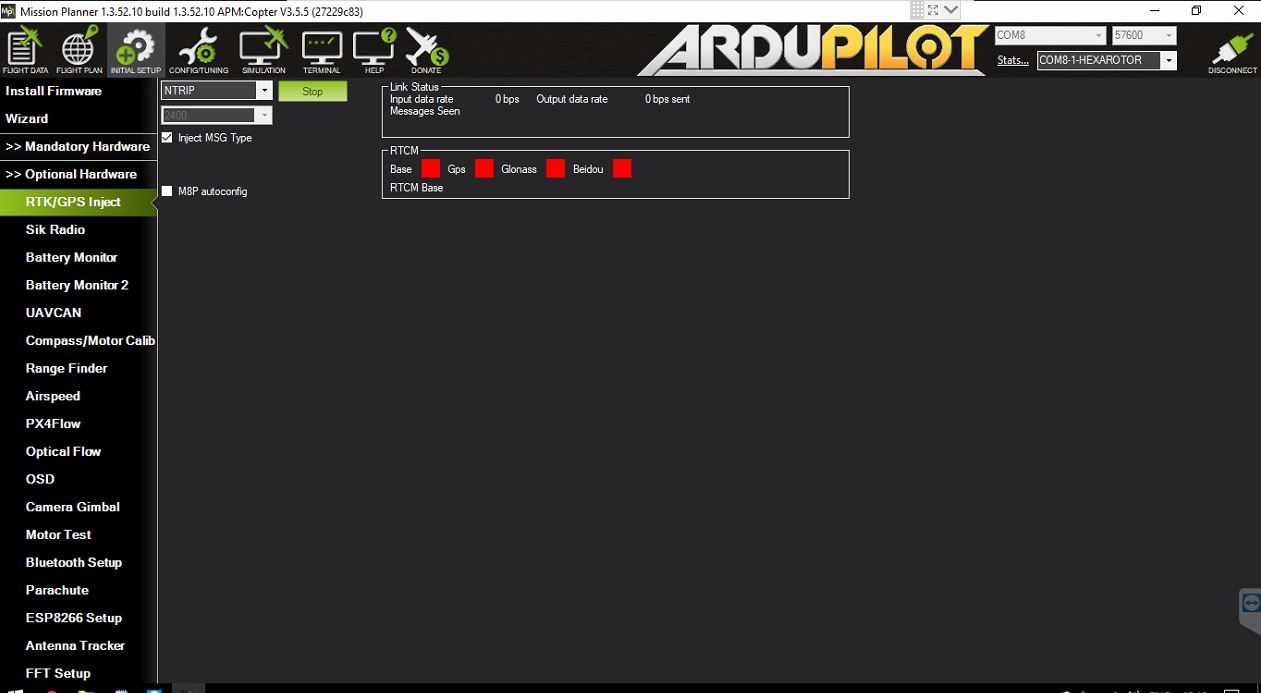
We also have no problems connecting to a single RTK station, Mission Planners’s NTRIP client works fine. The problems arise when some mount points require GGA and MP is not supplying them.
just did it, thanks a lot, hopefully someone from development team will have a look at. I do luck C# (NET framework) programming experience so It is kind of a pain to find out what goes wrong.
Hi Where can I find any info how to connect to NTRIP corrections ? What means for example “/mount” in address which I am using for connection with my NTRIP corrections system in Mission Planner? http://user:pass@host:port/mount
Is that mean just to connect to this base station ?
I have user. password, host and port and this Ntrip messages works with other GPS receivers. I am just clicking connect and nothing happens.