Hi Matt¡ Thank you for answering. Yes. I added two more instances and new params.

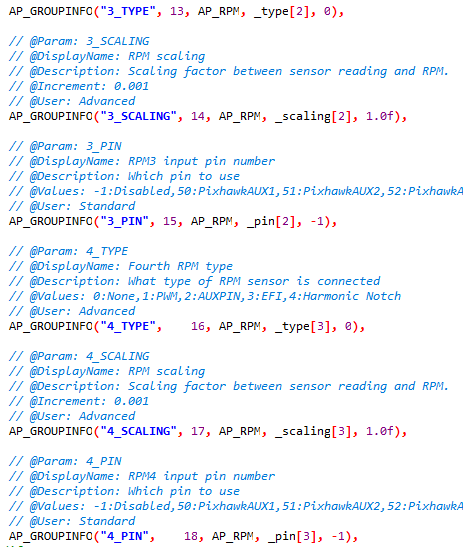
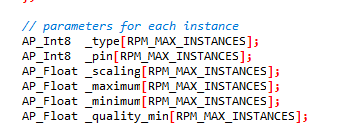
I changed the code as you suggested. But where can I change the size of the arrays? As I understand the size of the arrays depends on the variable RPM_MAX_ INSTANCES in the AP_RPM.h header file.
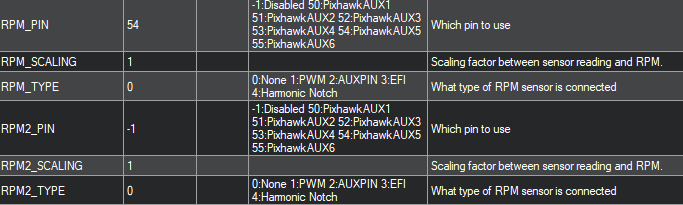
I still can not see these new parameters in Mission Planner. Please help ¡¡¡