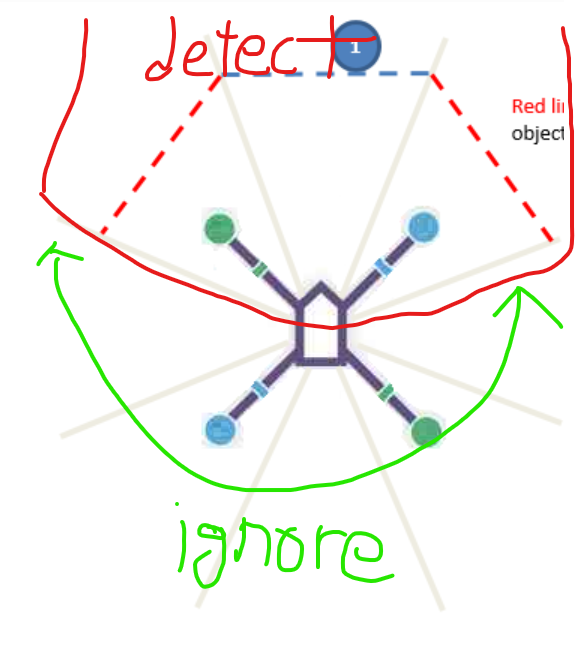
Hello, I am a student who is studying autonomous boats in Korea. The mission planner uses an A2 lidar, and I want to specify only the desired angle on the 360 degree lidar using the PRX_IGN_ANG and PRX_IGN_WID parameters. However, I am not sure how to set this parameter. If I want to recognize an object only 180 degrees forward, I ask you how to set the parameter. Thank you.
For example i want