This my rover .I am using:
Rover v2.51
(tank model)

two 130 electric motor
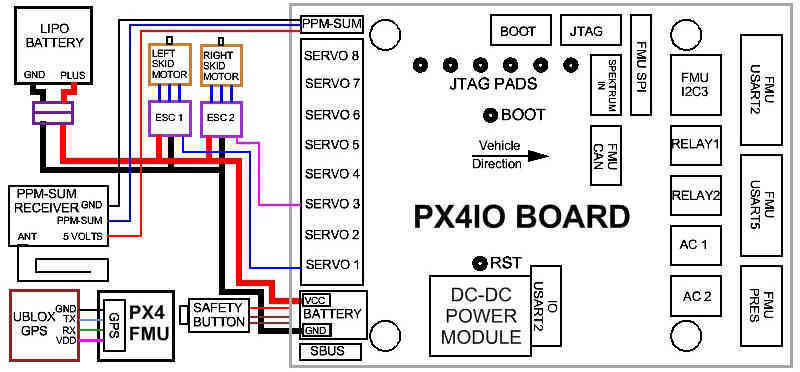
two MICBRO ESC 160a ,left esc to main outputs 1 and right esc to 3,ECS red singnl is cut ,PPM Encoder to 8 PWM
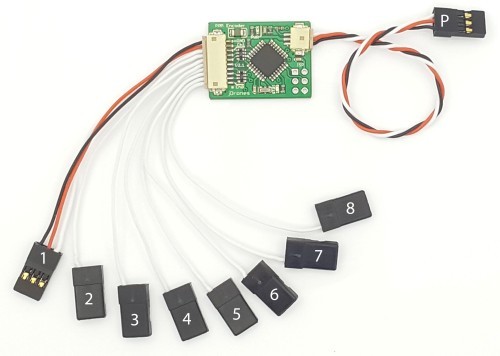
RC channel 1 to ppm encoder channel 1
RC channel 2 to ppm encoder channel 3
RC channel 5 to ppm encoder channel 8
RC channel 6 to ppm encoder channel 7
like this
transmitter is WTF09Ⅱand receivers too
problem:
when i link the battery .left ECS led is shining,seem not to link, pixhawk LED is yellow, it still can arm though the Mission Planning show disarm always.when i push the sticks .only channal 1 (roll) have in and out ,the MP show.