Good morning, I am developing a design of a Rover for the garden.
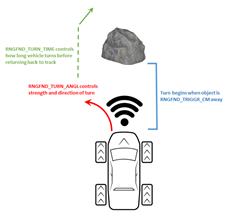
I have a Pixhawk 2.4.8 controller and a VL53LX0 sensor. Can it be used to avoid obstacles? “Dodge”
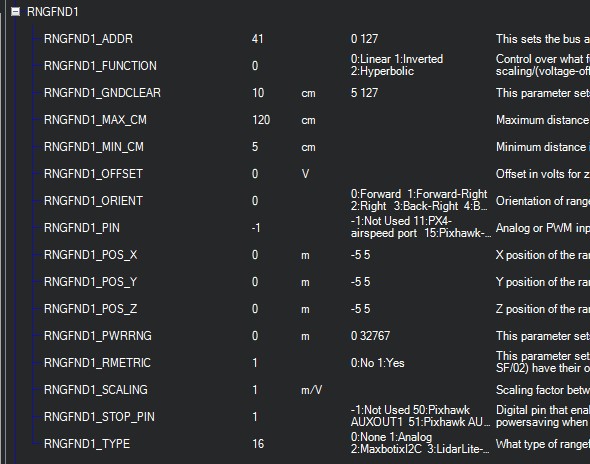
I connected the VL53LX0 and configured everything.
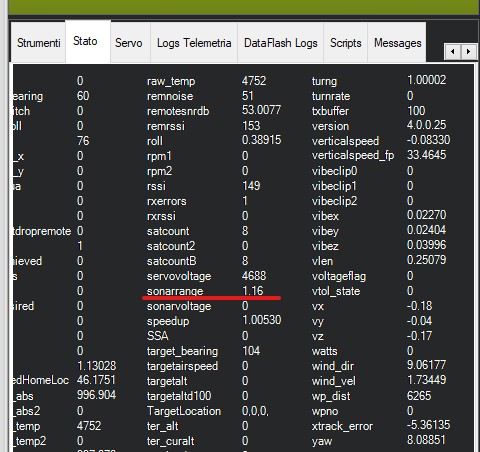
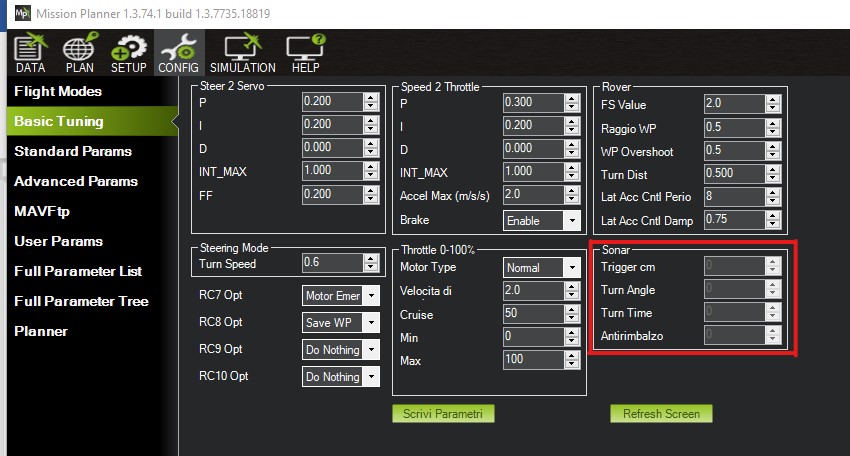
The sonarrange measures, however, I cannot enable the sonar options
thank you
greetings Simone