I’m preparing my PixHawk based rover for AVC. I can set waypoints and drive a course with good repeatability. I power off the rover and go home. I go back to the same location the next day or so, power the rover, arm it, and hit the start switch. I would expect the rover to drive the course with similar results to the previous day. But it appears to drive around randomly. If I upload the waypoints to the laptop, everything looks as I would expect. I changed the home position just slightly and sent the waypoints back to the rover. Then it rain the course ok. My intention is to run AVC, so I need to learn on Friday and then run on Saturday using Friday’s data, but my current operation isn’t going to cut it, what am I doing wrong?
Could you please send a log of the second drive where the rover didn’t work correctly so we can have a look.
Do you have ARMING_REQUIRE set to 1? That might tell you if there is a problem. Make sure the Rover has sat for 20 seconds or so to calibrate gyro’s etc and get enough satellites for GPS.
Thanks, Grant.
arming_require = 0. As I recall I could never get it to arm with the rudder requirement, so I dropped it to 0. I’m pretty sure the GPS is working when I made the runs, Power sequence looks like all the LEDS sequence as expected, with a beep. Then I get a 2nd beep and the big LED is blue. Maybe 10 seconds later the big LED goes green, and this is when I arm with the safety switch.
I believe I have the correct log files. The first is today’s run with erratic behavior, then the next log is after I power cycled the rover and it eventually navigated.
Well apparently the files are too big. The first is 23mb which will compress to 5.7mb, but that’s still too big for an upload.
@dksmall,
Can you put the files in Google Drive and provide a link?
Regards,
TCIII AVD
Well I did that correctly, here’s the link.
https://drive.google.com/file/d/0B-Cx-BjjVem-dmk1QS1kR1Nqckk/view?usp=sharing
You should set arming_require to 1 and see if you can arm your rover. Test that now if you can. If its setup correctly you need to press the safety button first - then hold the steering to the right for 3 seconds and it should arm. If you can’t there is something wrong and we need to get that resolved.
I’ll look into the logs.
Thanks, Grant.
How do you have the autopilot installed? Is the pixhawk facing forward and the gps/compass module facing forward also? I ask as it appears your compasses are behaving very differently so I think we need to change your ORIENT params. You have COMPASS_ORIENT set to 8 which means your compass/gps module is upside down?
Thanks, Grant.
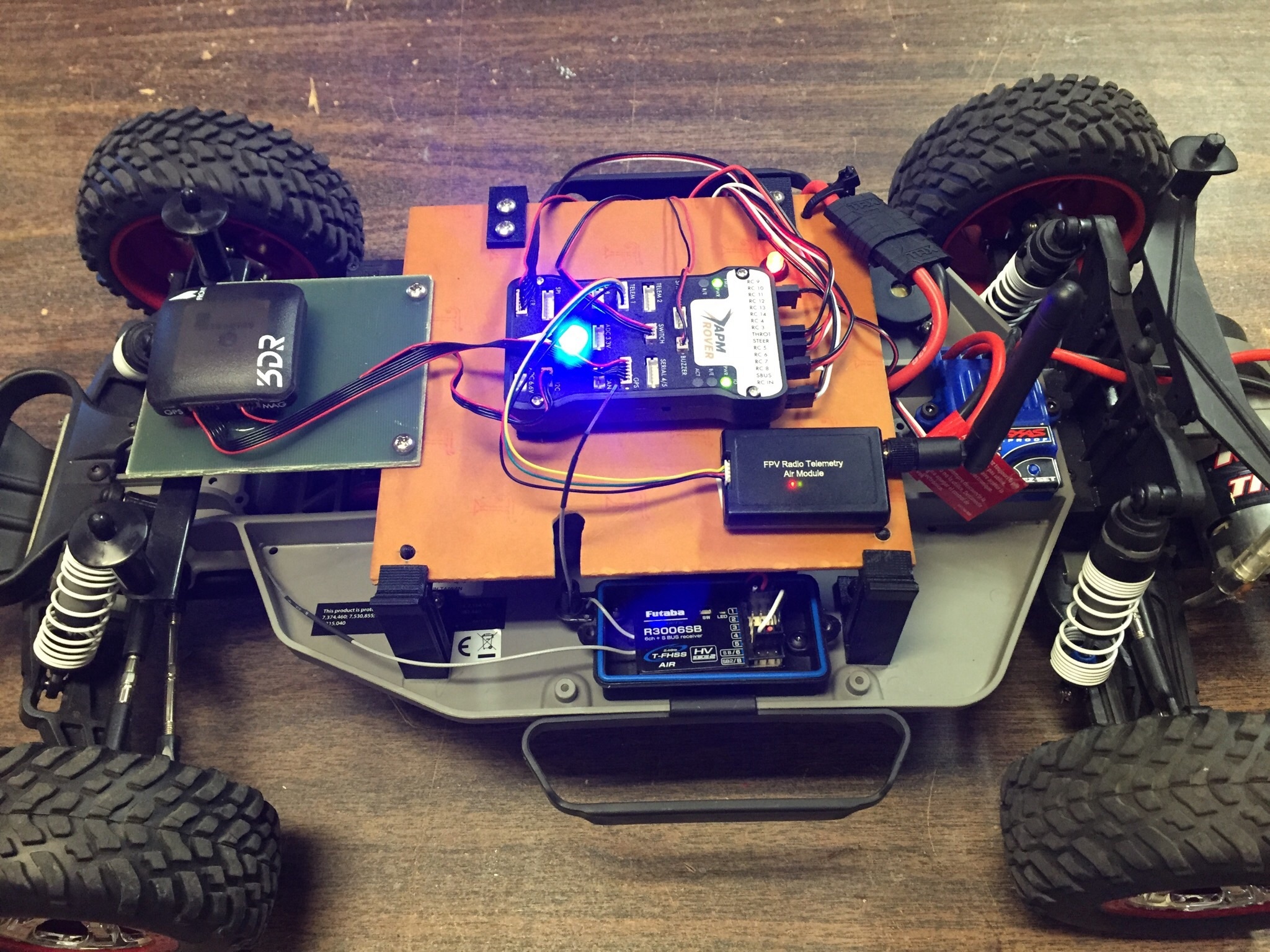
Well here’s a picture. I have no idea why the compass would read upside down. I’ll try changing the arm_require next.
COMPASS_ORIENT should not be 8! Change it to 0 and do a compass calibration again away from ANY metal including mobile phone’s, keys, sunglasses etc. I know its hard - easier if someone can help you.
Thanks, Grant.
Ok I will also recalibrate the compass, it will be a few hours I can get to the rover. Thanks for your help so far.
The rover does arm after I hold the rudder stick to the right, so now everything is being checked.
I can see on the compass page where it was set for a 180 rotation, so I set that to none and verified that compass_orient is now 0.
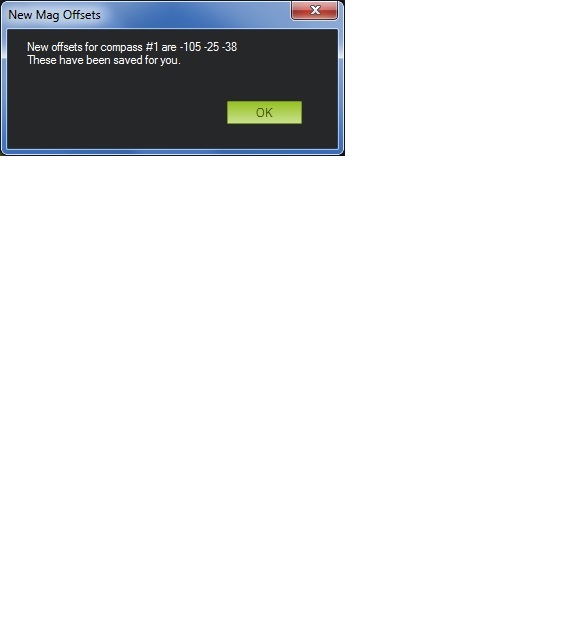
I stood outside and ran the compass calibration. The first time it finished before I rotated on all 3 axis, so I ran it again. After completion I got two dialogs with calibration data. Not sure why it shows 2 compasses, is there 1 in the PixHawk?

I’ll plan in going out tomorrow morning and see how it performs.
Yes there is a compass in the pixhawk and one in the external GPS/Compass module. Looking good - let us know how you go.
Thanks, Grant.
I made some runs this morning using the way point from last week. It seems to be working as expected now. I suspect it was a combination of the compass configuration and the system not being completely ready before I armed it. Thanks for all the support guys!
That’s great. Make sure you post back and let us know how you go in the challenge.
Thanks, Grant.
That could be an embarrassing post. 
@dksmall,
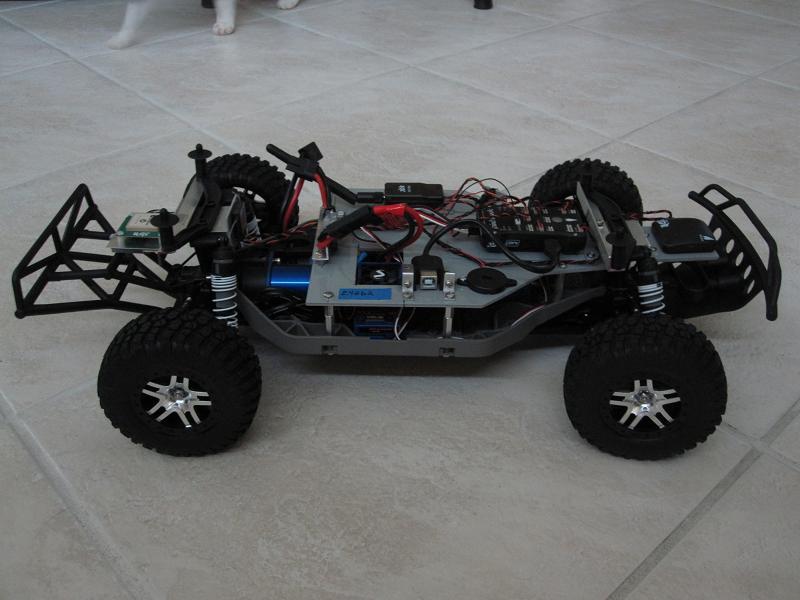
Here is a picture of my Traxxas brushless 4WD Slash with dual GPSs that I ran at the 2014 AVC in the Peloton Class.
Regards,
TCIII AVD

1 Like
Well as predicted my trip report is an embarrassing report. 
Typical rookie mistakes, I was rushed to the start line to begin the entire event, barely got a lock and armed before they said go. I switched to auto, and it sat there. I have to take the shell off to do anything, so I pulled the pins and everything seemed find. In manual I could steer the wheels, but in auto it wouldn’t go. I suspect I didn’t get the ESC turned on correctly.
Round 2 I started (yeah), took the dirt shortcut for bonus points, then hit the edge of a hay bale and was stopped.
Round 3 It took a long time to arm, kept holding right full rudder waiting for a green light and a beep, but nothing. Finally got the beep and I sat on the line waiting for my turn. Switched to auto, and nothing. (not again). Switched to manual, not realizing my throttle was all the way backwards, and it drove straight back at high speed, into the bales. This rebooted the PixHawk. At this point I realized the start switch on the rover was in the off position. So I un-pinned the shell, hit the safety button and armed it. I put the shell on and was asking the judge if I could start after the 5th rover went (we did staggered starts this year), but he said probably no. I told him I was going to run it, score or no score. Now it ran through the dirt, stayed on course through the next turn, straight down the course and hit the hoop. I moved it out of the way and it made the remainder of the course, missing the ramp ( I normally jump the ramp), clipped a corner but got past the finish line. But I didn’t get any points for the run.
Then they did a malay with all rovers that wanted to run. I think there were 9 of us. We started and 3 of us piled up, but I got free and was thrown off enough I jammed again the hay right before the turn onto the dirt shortcut. I moved it free and it turned onto the dirt, only to hit the hay again. Now is when something weird started. I moved it away from the hay and hit auto to get it going again. It went full throttle, throwing up dirt as it spun through the dirt. At the time I thought that was kinda cool, but it picked up speed and took off down the course. I had no radio control to stop it, but it completed the next turn nicely, went through the hoop, and started a 90° right turn, still at high speed. It hit a concrete curb and broke the left control arm. One of the few places there wasn’t hay bales for the border.
If I understand how to read the log file, it was going 8 meters/second when it crashed. The cruise setting were programmed for 3 meters/second. Is there anyway I can go through the log file and figure out what happened? The telemetry radio had come apart and I thought it might have switched to some other mode, but the log file shows the switches from manual to auto, and it was auto when it crashed. And I don’t know when the telemetry radio broke, it may have been the fatal crash, or one of the earlier ones.
Talking with several veterans of the event and they commented that this new course was not GPS friendly, short and only 10ft. wide. Anyone who’s done this for many years has been using dead reckoning, so maybe that’s something to try next time. Or may some sonar and weld that start switch on! 

And I have a roof mounted camera that I ran for each run, but when I did that final run I forgot to remove the lens cover! So you can’t see anything, but you can hear the crash quite clearly. 