This is a test of Follow mode for Rover. It uses the same underlying libraries and control methods as Copter-3.6’s Follow mode.
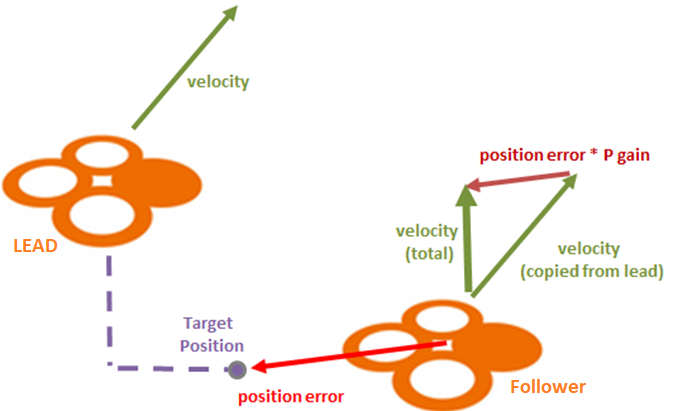
The following vehicle connects directly to the lead vehicle using wifi so no ground station is required. The follower then copies the lead’s velocity but also adds a correction to remove any position error. There can be many followers and even different vehicle types (i.e. Rover’s following copters, Copters following boats). Theoretically they could even be daisy-chained together.
The lead vehicle is an AION Robotics R1 with a Cube autopilot an NVidia TX1 companion computer running APSync.
The follower is a Thunder Tiger Toyota Hilux RC car again with a Cube autopilot. It also has an Adafruit ESP8266 board running mavesp8266.
Special thanks to Ammar Farah who did the intial implementation of Follow for Rover and to Peter Barker for helping me get the the wifi connection working between the vehicle.
By the way, to get the vehicle’s connected together using wifi two changes needed to be made:
- The AION Robotics’s vehicle’s APSync configuration had to be modified. ~/start_mavlink-router/mavlink-router.conf file need this added at the end
[UdpEndpoint to_other_vehicle]
Mode = Eavesdropping
Address = 0.0.0.0
Port = 18550
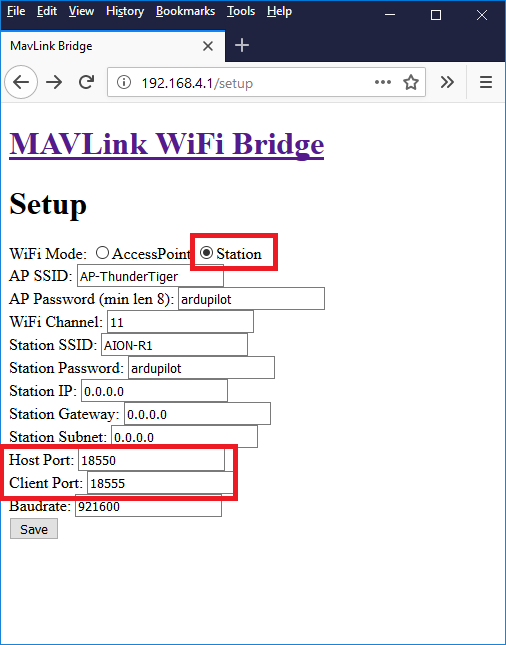
- the Thunder Tiger’s mavesp8266’s configuration had to be modified to connect to the APSync’s wifi access point on port 18550. This is what the little web configurator tool on the mavesp8266 looked like: