Hi all,
When my rover is running in auto mode, the EKF label turns red and the rover continues to wander around and even crash. I think it should change to Hold mode, but not. Can you tell me why it doesn’t hold?
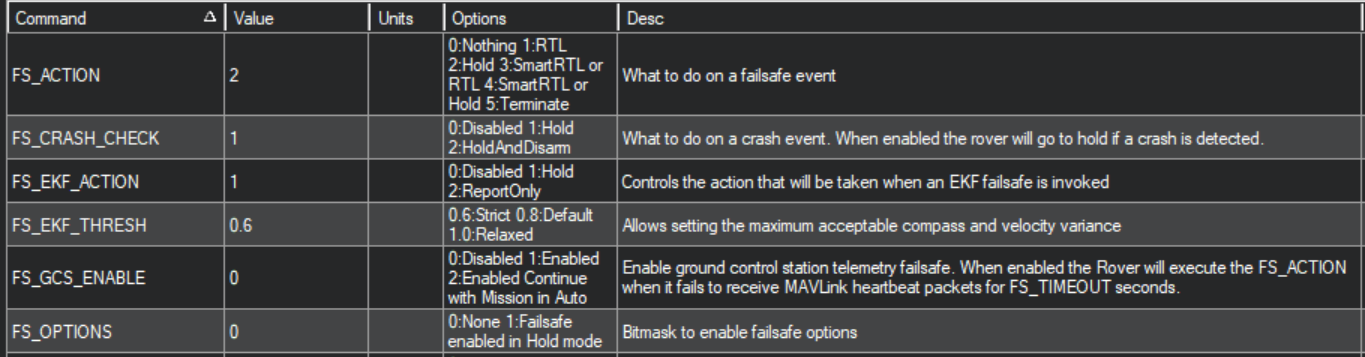
Bellow is my parameter.
Thanks
Hi all,
When my rover is running in auto mode, the EKF label turns red and the rover continues to wander around and even crash. I think it should change to Hold mode, but not. Can you tell me why it doesn’t hold?
Bellow is my parameter.
Thanks
We can’t help much without a flight log or at least parameter file. But the fact that your compass EKF status is red implies that that’s where the problem lies. Is it calibrated?
Hi Oli,
Thank you for your reply. The attached is my parameter file. I have a log but it’s a little bit large. You can down load and unzip it. The problem occurred at 4:20-4:22 p.m. on May 22 at the file end. The rover changed to auto mode, then ran but not the correct direction and crashed not hold.
ekf.param (16.1 KB)
below is link:
I got it. I found the EKF shows red in MP that it just needs one parameter over the threshold. But in rover, in ekf_check, it requires two parameters to exceed the threshold to trigger the failsafe event. Then I changed it to 1 in ekf_over_threshold function, it worked and hold.