In order to keep up with Plane and Copter, Rover-4.3.0-beta10 has been released for beta testing and can be installed using MP or QGC’s beta firmwares link or the .apj file can be manually downloaded from firmware.ardupilot.org. The changes vs -beta9 are in the release-notes and copied below.
Bug fixes
a) GPS unconfigured error fix for non-M10 uBlox GPS
b) Gremsy gimbal fix when attached to autopilot’s serial3 (or higher)
c) MambaF405 2022 gets VTX power on support
d) MCU voltage enabled on H757 CPUs (including CubeOrangePlus)
e) PiccoloCAN fix for ESC voltage and current scaling
f) Servo gimbal mount yaw handling fix (only affects 3-axis servo gimbals)
As always, any testing and feedback is greatly appreciated.
The grass has begun to grow, so I got the mower out for the first time in a few months today. I loaded 4.4-dev rather than 4.3-beta because I wanted to use optical flow. Relevant to 4.3, I can report that it’s still a bit of a struggle to achieve straight-line tracking, even with RTK GPS, moving baseline for yaw, AND optical flow enabled (I tried EK3_SRC1_VELXY=5 as well as EK3_SRC1_VELXY=3 + EK3_SRC2_VELXY=5). Will revisit my basic tune in the coming weeks and see how I can improve things.
The 105cm doll approaches 1/1 scale, and the 48cm doll gives a more racing feeling. However, on the 48cm doll with 6.5" wheels, BAL_PITCH_MAX can reach a little above 30º (with covers touching ground), but with 10" wheels it can go above 45º:
hi guys
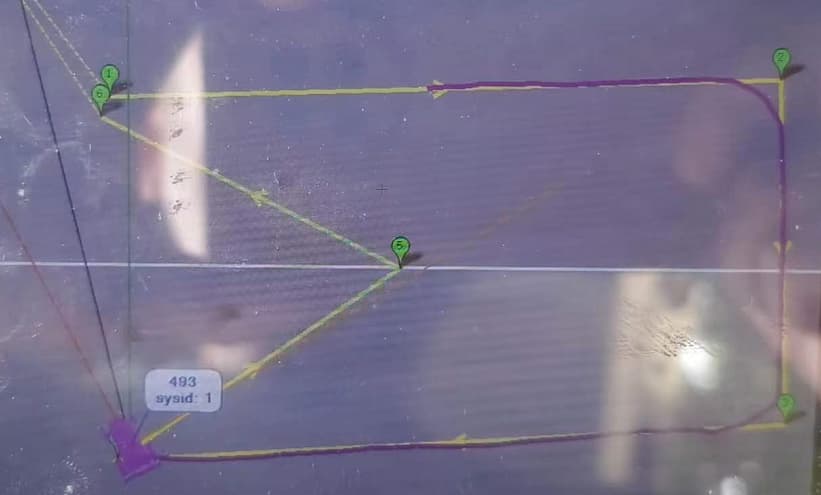
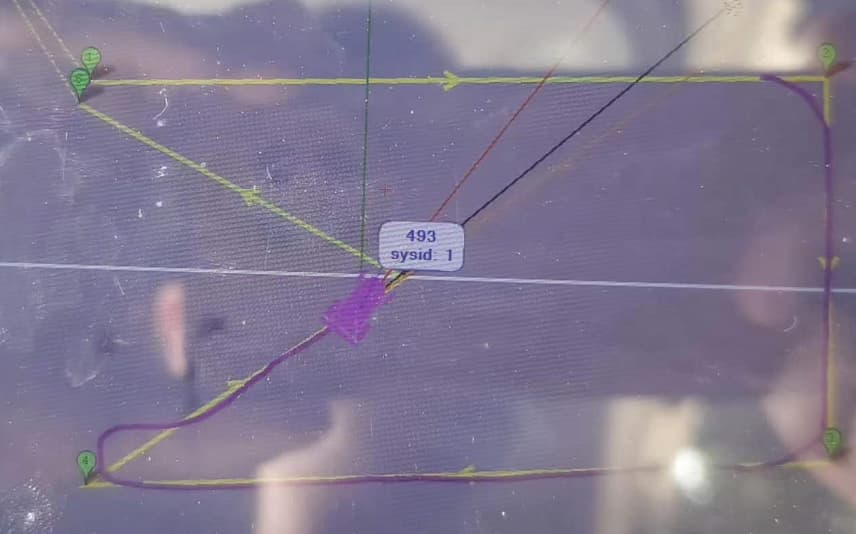
I’ve tried the 4.3.0-beta10 for S-Curves.It worked very well
Hard to believe it was so easy to adjust.I adjust to about 5 times on my rover and MP shows the track path very close to the waypoint path.Thank all of developers!
Here are two pictures ahout this.
I’ll keep optimize parameters. like waypoint 4 still need to optimize more【I don’t know which parameter control it】
I have two questions about this vesion.
1.I notice the PRX parameter shows PRX2 PRX3.Does it means this vesion supports 2 or 3 lidars work at the same time?
2.rplidar s1or rplidar s2 can be supported now?or none?because the rpliar2 work real very bad under strong sunshine.
I think this is very importent to us(users) to surport a lidar which could work stable under strong sunshine.You know most of rover need work outside .So that avoiding sensor should and need to be stable.
Because of Rplidar A2 is unstable under strong sunshine.Can you consider to suppor Rplidar S1 or S2.I notic these are someone worked on it and mignt already sucessd on S1.https://discuss.ardupilot.org/t/rplidar-visualizes-in-proximity-only-between-0-and-135-degrees/70373But it need to change the source code or something alse which I don’t understand(I’m no a IT man.know nothing about progame).Would you like to have a consider it on the next firmware ?
If you don’t know anything about programming, I suggest you to use the A3 rplidar, it’s better for outdoor applications, adding an external 5V supply works, if it fails sometimes you just need to reset the flight controller.
I also don’t know how to change the source code, so if you have a companion computer you can use Adafruit’s python library for the rplidars and connect the S2 (I assume it works for S1 too but I haven’t tried) and just send the proximity messages to the flight controller. It works too, but it requires a bit more work and knowledge.
Hi Miguel
Thank you for your suggesting.you mean that you have tried RPlidar A3 and it out of the box like A2?
A2 also fails sometimes and need to restart many times(without anyreason.sometimes it farl and you need wait for one or half anhour and restart it ,it worked).I use a 5V10A DCDC for A2 power supply and set up an independent switch.
Companion computer is a good idea but it cost a lot more.Thank you anyway.