I have some very encouraging updates today.
First, to reiterate, BendyRuler does not appear problematic the way I described in my first post here. Again, it simply appears to be honoring the fence margin a little better than it may have previously.
As mentioned above, none of the things I tried, including minor modifications to the firmware code itself seemed to alleviate the brief instances of “No Fix” on GPS1 with a moving base/rover/GPS-for-yaw configuration. I even managed to get the SIK radios talking at 115200 baud, and that made no difference.
I used a slightly modified version of my ESP32 based serial bridge to get RTCM3 directly to UART2 of the moving base F9P, bypassing MAVLink injection entirely. I’ll post an update on that topic elsewhere, as ESP-Now range is quite impressive with external antennas!
With RTCM3 injection bypassing the flight controller entirely, I have extremely stable GPS operation - probably the best I’ve ever seen. GPS1 was a rock solid “RTK Fixed” for my entire testing session today under Rover-4.1.0-rc1.
It’s a bit frustrating that RTCM3 through the flight controller is so problematic, even with an H7 board, but I do understand the challenges there. Just like my testing of moving base RTCM3 to rover through the flight controller (GPS_DRV_OPTIONS=0), some rigorous testing of MAVLink RTCM3 to moving base appears to require some amount of compromise that may always be present. (EDIT: I was wrong…keep reading - MAVLink injection works great with F9P firmware 1.13+).
As of today, the way my fixed base station is configured, I now have a possibly unique arrangement that makes it extremely easy to switch between MAVLink RTCM3 injection and external/UART2 messaging, so that may prove helpful in future testing.
TLDR;
All that to say…I no longer see any roadblocks or concerns with respect to releasing Rover-4.1.0 stable, and I’m really looking forward to S-Curve navigation as a welcome update in a future release. Thanks much as always to the dev team for the attention to detail and receptiveness to feedback.
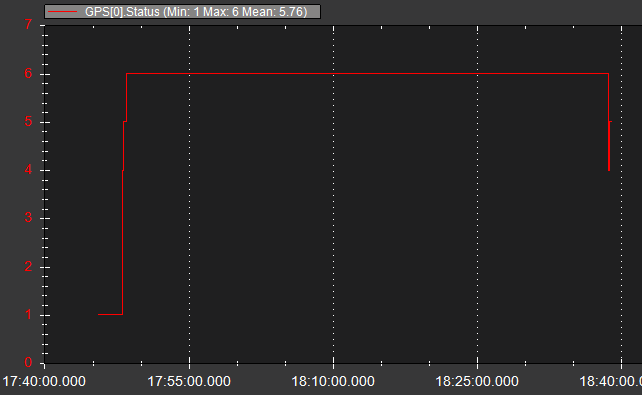
EDIT - the proof in the pudding - ~50 minutes of 100% RTK Fixed operation!