Rover-4.1.0-rc1 has been released for testing and can be downloaded using MP or QGC’s beta firmware link. The changes vs -beta7 are in the release notes and copied below
Changes from 4.1.0-beta7
- Enhancements
a) DCM fallback easier on boats
b) Flywoo F745 Goku Nano support
c) MatekF765-SE support - Bug Fixes
a) ChibiOS scheduling slip workaround to avoid occasional 60ms delays found on MatekH7
b) EKF2 divide-by-zero protection when using optical flow (issue only found in simulator)
c) External AHRS (e.g. VectorNav driver) init fix
d) KakuteF4Mini SBUS fix
e) Pixhawk4 blue and red LEDs swapped
Thanks again for all your help with the beta testing!
As @Yuri_Rage mentioned over on this thread Rover-4.1.0 is on the cusp of being released officially. The issue list is not completely clear but many of these items are not blockers to the release.
The “PRX missing from 1MB boards” issue is perhaps the most serious but I’m tempted to resolve this in a point release which probably won’t be that far off because we are going to try and keep Copter and Rover in sync from now on.
My feeling is that 4.1.0 is a large improvement over 4.0 and we could release it any time. What do you all thing?
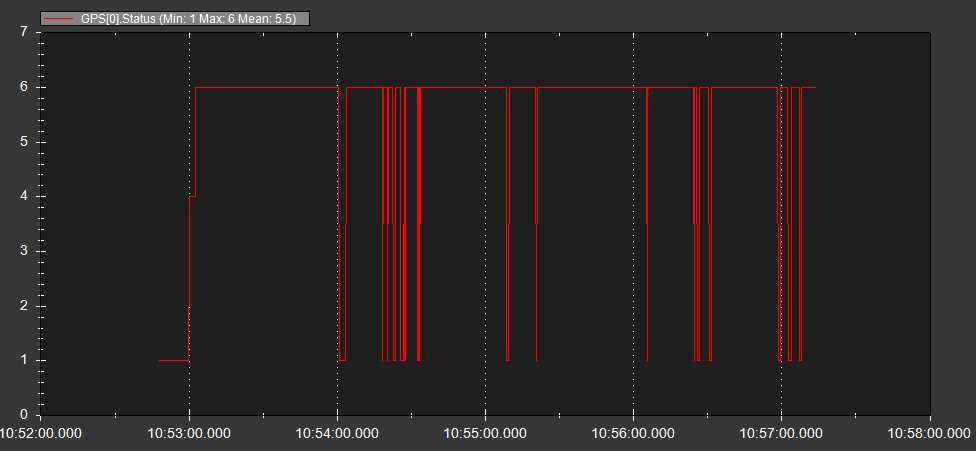
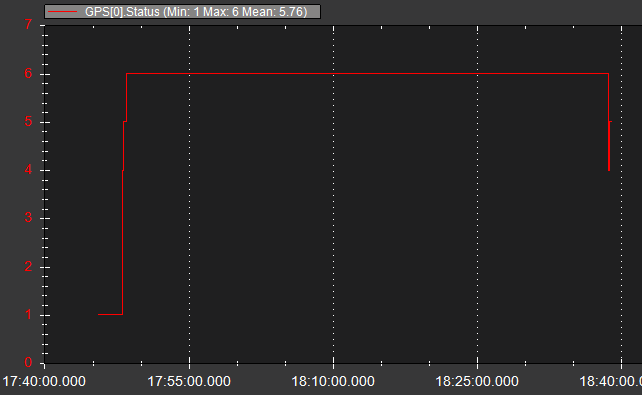
 . With MAVLink RTCM3 injection through Mission Planner and F9P firmware 1.13, I’m seeing rock solid GPS performance once again.
. With MAVLink RTCM3 injection through Mission Planner and F9P firmware 1.13, I’m seeing rock solid GPS performance once again.