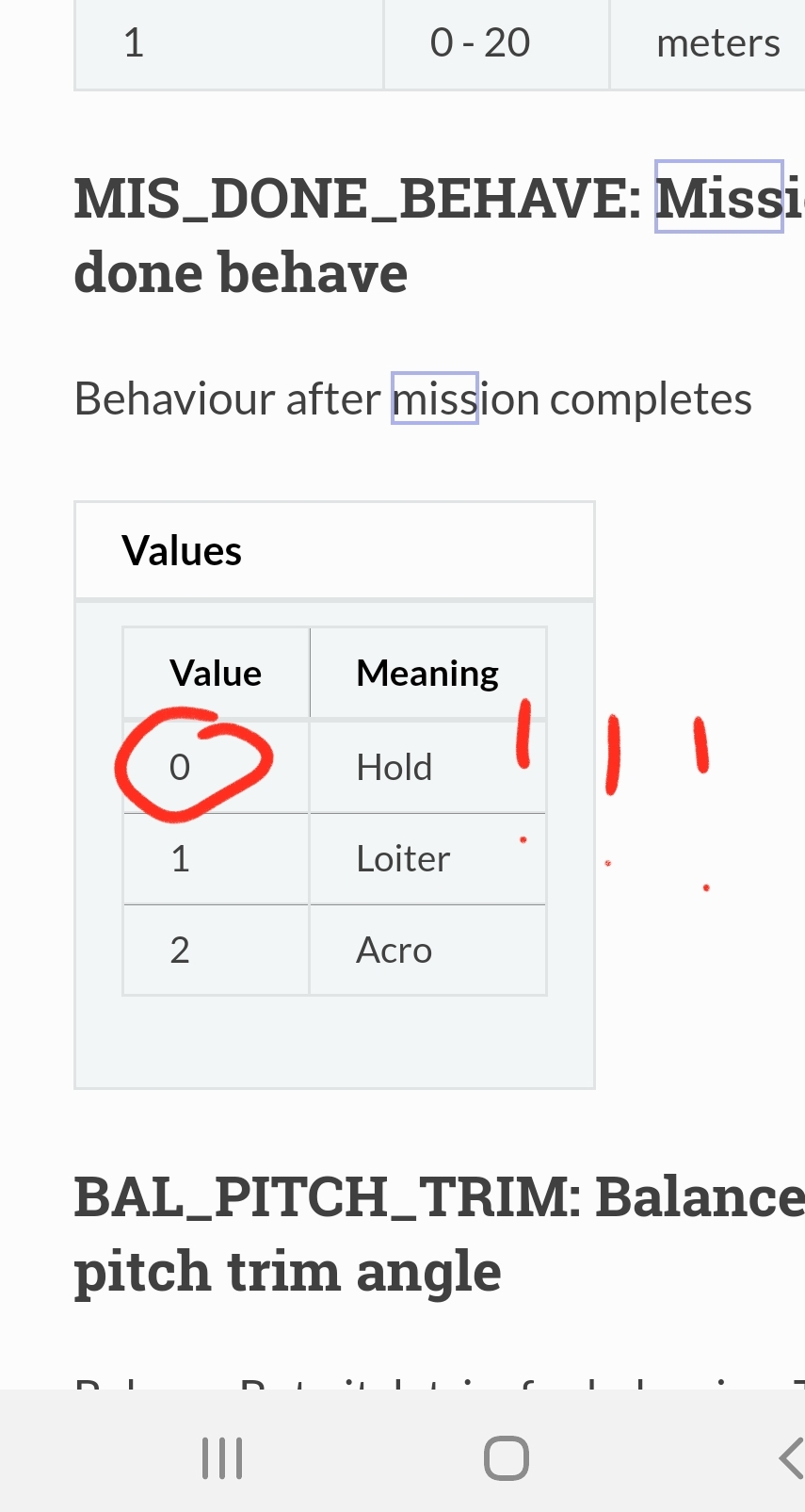
Der Pixhawk bleibt bei beendigung der Mission im AUTO statt in HOLD / LOITER / ACRO zu wechseln.
Mission Planer (PC) KEINE Reaktion
Mission Maker for Android APP KEINE Reaktion
Ground Control APP nur Mission “Complete” trotzdem Auto
Pixhawk PIEPT nur bei erreichen / Mission Ende!!!
Habe es gerade im Garten getestet und komme nicht weiter🤷♂️
Hat jemand eine Idee warum der im Auto bleibt und nicht den Mode ändert?
Beim APM war das kein Problem!!!
“Mis_done_behave” issue with Pixhawk 2.4.8 and Rover 4.0 in one boat.
The Pixhawk remains in AUTO instead of in HOLD / LOITER / ACRO when the mission is completed.
Mission planner (PC) NO reaction
Mission Maker for Android APP NO response
Ground Control APP only mission “Complete” anyway car
Pixhawk BEEP only when reaching / mission end !!!
I just tested it in the garden and can’t get any further
Does anyone have any idea why he stays in the car and does not change fashion?
That was not a problem with the APM !!!